 |
 |
256(�W�S���[)-Series ���L�@
�����̂悤�ɁA���̑��ɂނ��čăX�^�[�g�i�Ƃ������ƂŁA�z�[���y�[�W�̃��t���b�V���j�B
�O����̔��Ȃ��������ׂ��v��������������ƍ��Ȃ��Ƃ����Ȃ��Ȃ��A���Ďv���Ă܂��B
�P�N�キ�炢���^�[�Q�b�g�ɂ��������{�b�g���ƁA���� 256�i�W�S���[�j����̊����x�����߂�Ƃ������̂ƁA�Q���点�邱�Ƃɂ��܂��B
����ɍs���������e�i���X�́A���L�̂Ƃ���B
|
|
�@������ƃp���t���ȕ��̂v����������܂����̂ŁA�Љ���Ă��������܂��B
�@�݂��݃��{�b�g�������@����ł��B
�@�W���C���o�f�O�R�̓���ȂǁA������Ɣg�`���Ƃ��Ă܂��B�@���������f�[�^�A�ق�Ɨǂ��ł��ˁB�@���ꂩ������҂��Ă܂��B
�@���A2/14�ɏ�����Ă���A�b�p�[�P�[�X�������ɂn�����O��Y�ꂸ�ɁA�ł����A�����P����Ă��܂��Ă��݂����ł��B
�@���āA�ǂ��̃T�[�{�Ȃ낤�B�B�B�@�i��ꂽ�T�[�{�ł͂Ȃ����Ƃ͊m�F���܂����j
�@�o�͎����������Ƀu����͂��Ȃ̂ŁA���\�킩�肻���Ȃ��ǁB�B�B
�i�Q�O�O�T�N�R���Q�V���j
�u��̒��ł̒���L�v���X�V���܂����B
�uKO RedVersion �̃|�W�V�����L���v�`���v�ɂ��Ă܂Ƃ߂Ă݂܂����B
�u��̒��ł̒���L�v�ɉ����N���N���̉�H�ƃ\�[�X���ڂ��܂����B
�i�Q�O�O�T�N�S���Q�A�R���j
�u��̒��ł̒���L�v���X�V���܂����B
�@�E�E�E�@�Q���A���ŃI���W�i���T�[�{�ɒ��풆�I
�������̌����������܂����B�@����T�[�{�ɂƂ������ƂŁA�u��̒��ł̒���L�v�Ɏʐ^���܂��ڂ��Ă݂܂����B
���������Adenno_ono ����̂Ƃ����ŃR�����g���������A���肪�Ƃ��������܂����B�@���C���������Ă��̂ł��I�@�����܂��I
�i�Q�O�O�T�N�S���X�C�P�O���j
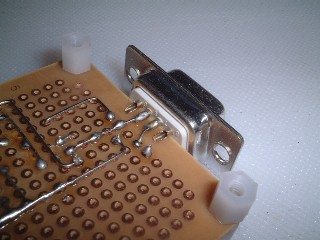
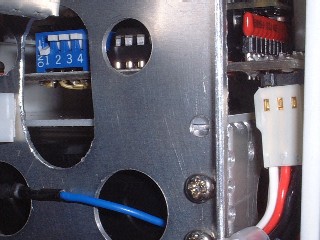
�@SISO����̂Ƃ���� DSUB 9pin �̊���t�����@�ɂ��ď�����Ă����̂ŁA���̕��@���Љ�܂��B�@���オ�聕�Œ����������ł��܂���B
 |
 |
| �\���� | ������ |
���̕��@���g���A�R�l�N�^���Œ肷�����p�����������܂��B�@�܂��A��̌��݂ƃs���̌��Ԃ��҂�����ŁA�O���O�����܂���B�@����������B
�i�Q�O�O�T�N�S���P�Q���j
�u��̒��ł̒���L�v���X�V���܂����B
�@�E�E�E�@�܂��܂� Power-MOSFET �֘A�ƁALow-Side PWM �����̎��Ȃ�̉��߂ɂ��Ăł��B�i�P�U���j
�@�E�E�E�@�����āAHEW4 �ɂ�� R5F21114FP �̂��߂̃p�\�R���������� TimerY/Z
�̎g�����ɂ��Ă܂Ƃ߂Ă݂܂����B�i�P�V���j
�i�Q�O�O�T�N�S���P�U�C�P�V���j
�@�T�g�[�d�C������ E�W�Xpen �Ȃ���̂��̔��J�n����܂����B�@����́A�g���邩���B
�@���̂悤�ɁA���܂ł����j�o�[�T����œd�q�H�삵�Ă�����́A�y�ł������ł��B
�@�߂������ɔ��������A��i�ł��B
�@�u�d�q�H��̎������v�̌�Ղ���͑����g���Ă����z�� web ��ɋL������Ă܂��B�@���Q�l�܂ŁB
�i�Q�O�O�T�N�S���P�W���j
�@�f�v���n�܂�܂����B
�@�ŋ߁A�f���I�ɑ����Ă������{�b�g����ł����A��C�ɑO�i���������Ƃ���ł��B
�@�܂��́A256(�W�S���[)����ŗV�ׂ�悤�ɂ������B�@�I���W�i���T�[�{�̐������������������A���������Ƃ���ł��傤���B�B�B
�@�i256����̓\�t�g���ŏI���A�����Eagle �̎g�����}�X�^�[�ŏI����Ă��܂��悤�ȋC�����Ă܂��j
�@�u��̒��ł̒���L�v���X�V���܂����B�@�E�E�E�@�܂��܂����n�䂦�̉߂��B
�@�Ƃ���ŁAYellowsoft ��������AXilinx FPGA Spartan3 �̏��^�{�[�h����������܂����ˁB
�@�g���Ă݂����A�C�e���ł��B�@�ȑO�A�G���̕t�^�ł��Ă����̂��Y�ꂽ���Ƃ��ẮA�P�D�T�T�[�{�ƍ����ł����ǁA�P�~�����ł��B
�@�܂��A�H���d�q�ʏ������ŗ����������x�Z���T(ADXL311)���W���[����@\800 �Ŕ�������Ă܂��B�@�Ɍ���Ƃ������ƂȂ̂ŁA�����ҏ����H�ł��ˁB
�@�����Z���T�[�������ꂽ���Ƃ������A�����x�Z���T�[���`�c�b�Ŏ�荞��ł���Ƃ������ɂ����߂��ƁB
�@���ƁA�Ƃ��Ă������Ă܂��B�@�N���m���Ă����狳���Ă��������B
 |
�@��Γd�������̂Q�e�̃J�E���^�[�O�̒I�ɂ������A�\�ʎ����^��NPN, PNP �^�g�����W�X�^�����̂ł����A�^�Ԃ��T���Ă���̂�Y��Ă��܂��܂����B �@�P�O�łP�O�O�~�Ƃ������ƂŁA�Փ��������Ă��܂����㕨�Ȃ̂ł��B �i���������v�P�O�O�������Ă���A�@���n���ȏj |
�i�Q�O�O�T�N�S���Q�X���j
�@�u�v�����������g���v�� �������킳�� ��������������܂����B
�@�S���Q�X���̏�L�ɂ���^�����킩��Ȃ������\�ʎ����^�g�����W�X�^�ł����ANPN
�� 2SC2712 �ŁAPNP �� 2SA1162 �ł͂Ȃ��ł����H�Ƃ̂��ƁB�@�킴�킴�X���Œ��ׂĂ����������݂����ŁA���k�ł��B�@���肪�Ƃ��������܂��I
�i�Q�O�O�T�N�T���P���j
�@�ŋ߁A��������A�u��̒��ł̒���L�v����X�V���Ă܂����A�{���������ł��B�@�Q���قǎ��ƂɋA���Ă����̂ł����AEAGLE �ɂ��A�[�g���[�N�ɂ�����Ă��܂����B�@�A���Ă݂�ƁA�ו����͂��Ă��āA���C���h���h�������ė��܂����B�@����ρA��͂����˂��I
�i�Q�O�O�T�N�T���Q�C�R���j
�@ONO�̓d�]�ǐV�� ( denno_ono ) ����̂Ƃ���̂S���́u�I�蔲���v�ɑI��܂����B�@���ꂵ���ł��I
�@���{�b�g����Ă��āi����Ă�r���Łj���ꂵ�����Ƃ̂P�ɂ́A�����̏����g���Ă��������邱�ƁA�Ƃ������̂ɂ�����܂��ˁB�@�͂₭�F��ȏ�Ŏ��샍�{�b�g������I�ڂł��������ł����ǂ˂��B�B�B�ǂ����A�Z�p�����Ă������͍̂�邱�Ƃ̊y�����A�o���オ��܂ł̉ߒ��Ɋ�т������Ă��܂��Ƃ��낪�����āA�Ȃ��Ȃ������Ƃ����Ƃ���ɍs�������܂���ˁB�@�_���w�K���������Ă�������ɂ�鈫�e�����킩��܂��A�u�P�O�O�_�ł͂Ȃ��Ă������̂ŁA�ł���Ƃ���܂Łv���Ă����̂��A��R�������ł���ˁi���O�ɂȂ�ƕʂł����ǂˁj�B
�@�Ƃ����A���Ȃ܂��āA�f�v�i�{���͍ŏI���A�����ǖ����͗L���x�ɂ��Ƃ点�Ă�������̂ł��ƂS������j�̉߂����������߂��Ⴈ���Ǝv���܂��B�@��V����O�R���P�R���̃������͑�G�c�ł����ǂˁB
|
�@�����͂���Ȋ����Ń��������Ȃ��烍�{�b�g�������Ă݂悤�I
�@�i�X�F�S�O�@�L�ځj
�@���ǁA�����̓X�P�W���[���̂P�Ԃ����ŏI����Ă��܂����B�@�Ƃ����̂��A�|�J�|�J�z�C�ɗU���ĂS���Ԃقǒ��Q�����Ă��܂����̂ł����B�B�B
�@�\�z�ȏ�ɏ������܂Ƃ߂�ꂽ�̂ŁA�s���w�b�_�� 2mm ���͌�����܂����B�i�ڍׂ́A�u��̒��ł̒���L�v�@�ɂāj
�@���ƁA�ǂ��ł��������Ƃł����A�����́A�Q�O�O�T�N�T���T���̂T���R�����������̂ł��ˁB
�@�i�Q�S�F�S�T�@�L�ځj
�@�i�Q�O�O�T�N�T���T���j
�@�������A���T������N���āA�S�\�S�\����Ă܂��B
�@�܂��́A����̌v��̂T�ԁA�l�b�g�T�[�t�B������B�B�B�Ǝv������A���f���̋L���Ƀn�}�b�e���܂��܂����B�@�d�q��H�n���I����ĂȂ��̂ɁA�܂��A�������A���~���H�ւƋt�߂肩�H���Ċ����ł��B�@�����Ȃł��ˁA�ق�ƁB�@����
256(�W�S���[�j�������Əo���オ���Ă�̂�����A�A���~���H�͗v���͂��I�@�i���ǁA����ς�A�ق����B�B�B�j
�@�i�Q�O�O�T�N�T���U���j
�@�����I�Ƃ��������ł����Ai, ROBOT ���ς܂����B�@�T�[�{������Ȃ���ςĂ����̂ł����A���S�Ƀi�K������ԂŐi�����������܂����B�@�ϏI������P�V�����납�����̘I�����X�^�[�g�B�@�����L�H���u��̒��ł̒���L�v�@�ɂāB
�@�i�Q�O�O�T�N�T���V���j
�@�̂�т�߂����Ă��ꂽ�f�v�������ŏI���B
�@�v�X�ɃX�g���X����J������Ă̋x�݁A�Ƃ������Ƃł������ł��܂����B
�@���{�b�g�̕��ł����A���ǁA����Ɏn�܂��āA����̓r���łf�v���I���Ă��܂��A�Ƃ����`�ɂȂ�܂����B�@256(�W�S���[�j����̃\�t�g�E�F�A�ʊ܂߁A�X�P�W���[�����O�����Ȃ��ƒ��肷��ł��Ȃ����Ȃ��B�B�B�Ǝv���Ă��܂����炢�m�[�^�b�`�ł����B
�@�Ƃ������ƂŁA�{�����I���W�i���T�[�{�������́A�������ɂāB�B�B
�@�i�Q�O�O�T�N�T���W���j
�@�܂��߂Ƀ��{�b�g�ɂ��ĕ����J�n���悤�Ǝv���āA�u�q���[�}�m�C�h���{�b�g�v�Ȃ���̂��w�����܂����i7andY �z�����Ă������������ł��Ȃ����̂ł��傤���˂��B�@�f�v���I�������ɓ͂��Ă��B�B�B�j�B
�@���̖{�ł����A���w�̂������O���ɂ���̂ł����A�����ǂݔ���Ă��A�킩����e�ɂȂ��Ă�̂ŁA�����̕��ɂ͂悢�ł��ˁB�@�ꉞ�A�Ō�܂œǂ݂������̂ł����A�o���Ă邱�Ƃ͂قƂ�ǂ���܂���B�@�ł��A��`���킩�����̂́A�����̃��f���������ƍ���ĕ��s���������Ă���Ƃ������ƁB�@�������m�肽�������A�Ƃ����Ƃ��낪������Ă����̂ŁA�������̓X�b�L�����܂����B�@�uROBO-ONE �̂��߂̓��s���{�b�g����K�C�h�v�@�����{�b�g���̂��̂̍H��K�C�h���Ƃ���ƁA�u�q���[�}�m�C�h���{�b�g�v�́A�\�t�g�E�F�A���̊�b���Ƃ������Ƃ���ł��傤���B�@�����ƕ��������I���Ă����l�ɂ͗ǂ��ł��ˁB
�@�i�Q�O�O�T�N�T���X���j
| �i������Ɨ]�k�j �x�{���Ă牫��֗��s���Ă܂����B ��w�̎��ɂP�x�s�����̂ł����A�S�R�ό����ĂȂ������̂ŁA����͊����S�ŁB �~�J�̎����ʼnJ���o�債�čs�����̂ł����A�ړ����ȊO�͉J���オ���āA����Ԃ��o�Ă���قǂł����B �֓��ƈ���āA�Ƃ��Ă����������ł��B �Ƃ�����A���t���b�V���ł����̂ŁA�܂��A��������d���A���{�b�g���A�����܂��I |
�i�Q�O�O�T�N�T���P�T���j
| �i������Ɨ]�k�j �撣��܂��I�錾���ẮA���̂P�T�Ԃ̓L�c�������B denno_ono����̕ǐV����q�����Ă�ƁA �F�����ɐi��ł�݂����� ��݂ɂȂ�܂��ˁi���܂ɉ��݂܂����j�B ���s����ĂR�����A��s�@�ɏ��܂����B �H�c��`�ɂ͓����s�������Ȃ��C���B �����A�R���F����`����A���Ă����̂ł����A����Ȃ��̔����B
������̂ӂ邳�Ƃ͉��ւ������̂ł��ˁi�ق�܂����H�j �����N��̐l�����́A�w�Z���H�ł悭�H�ׂ��Ǝv���܂��B |
�i�Q�O�O�T�N�T���Q�P���j
| �i������Ɨ]�k�j �撣��̂Q�T�ڂ��L�c�������B�B�B �uNEC�G���N�g���j�N�X�� DIP �p�b�P�[�W�}�C�R���v �Ƃ���ŁA�ŋ߁A�P�`�b�v�}�C�R���̃����C�N���i��ł���悤�Ɏv���܂����B �������ɂȂ����̂��킩��܂��ARenesas �ɑ����� NEC�G���N�g���j�N�X����� Sunhayato ���� 2.54mm DIP �p�b�P�[�W�̃}�C�R�������Ă܂��ˁB
�e�Ђ���A�ǂ�ǂ�o�Ă���ƁA���j��H�I�ɗV�ׂċZ�p������������ł��ˁB ��{�͂Q�O�O�T�N�S���̃g���Z�̍L���y�[�W�ɂ���78K0�V���[�Y�ł��ˁB WDT�ƓƎ��̍����N���b�N��H�������Ă���̂��ǂ��ł��ˁB |
�i�Q�O�O�T�N�T���Q�X���j
�@�Q�s���Ȃ������͑��������ł��ˁB
�@���� ROBO-ONE �ɏo�ꂷ�邵�Ȃ��ɂ�����炸�A�Ƃ肠�����h�͉�������A�N�V�������B�@��Ђۗ̕{�����߂��ɂ���݂����Ȃ̂ŁA�Ƃ肠�����A�\��B�@�o��Ȃ��ł��A���C�����邵�A�ό��ɂ͂悢�Ƃ���ł��ˁB
�@�W���C���Z���T�ɂ��āA�F�X�ƒ��ׂĂ݂܂����B
�@murata ���̃W���C���ł����A�����d�q�ň����Ă���̂�����܂����A���i�J�^���O���悭����ƂQ���ɂ���ꍇ�A�^�C�v�̈Ⴄ���̂��g���Ă��������A�Ƃ���B�@��������邽�߂Ƃ���̂ŁA�R���p�N�g�ȂQ���W���C������낤�Ƃ����ꍇ�A�C�����Ȃ��Ƃ����Ȃ��ł��B
 |
���A���낢��ƃm�E�n�E������Ă�̂ŁA�W���C���̃R���p�N�g�����l���Ċ�������Ă݂悤�Ǝv���܂��B�@���ځAmurata ���쏊�� web �ōw������]�Ƃ��Ă݂��Ƃ���A�l�w���������t���Ă���������Ƃ̂��ƁB�@�i�������A�����d�q�������I�j�@�Ƃ肠�����A�S�iMA�ŁAMB�łQ���j�����I�B
�@PG-03G �̎��ɁA�h���t�g���������̂ł����A����́A��L�̂Q�ɊY������̂��ȁH�@�Y������n�C�p�X�t�B���^����H�}�܂ŕ`����Ă�̂ŁA�e�ł��ˁB�@4.7uF, 100k���ł悢�����ȁB�@�ӂނӂށB�B�B�@�Z�������猻�������B�@���������A�W���C�����͂��O�Ɋ������Ă݂܂����B�@��H�I�ɂ́A�J�^���O�ʂ�B�@�œK������Ƃ���͐��i���͂��܂łɍl����Ƃ��܂��B�@���̍H�v�����ĂȂ��̂ŁA��25x28mm2 �̊�T�C�Y�ł��B
�i�Q�O�O�T�N�U���Q���j
| �i���A���j �ƒ�Ŏg���Ă��v���o�C�_��ύX���邱�Ƃɂ����s����A �z�[���y�[�W�̍X�V���~�܂��Ă��܂��Ă���܂��B �������炢�ňڍs���ł���̂��A�킩��Ȃ��̂ł����A �����̐܂ɂ́A���낢��Ə����������Ƃ����܂��Ă���Ǝv���܂��̂ŁA �܂��A���ɗ��Ă��������B |
�i�Q�O�O�T�N�U���P�X���j
�@�T�[�o�̒��q�������A�X�V���{�����ł����A���߂�Ȃ����B
�@�W���C�����͂��A��̓I�ɓ������Ă݂܂����B�@��H�I�ɂ́A����̂��̂Ƃقړ����ł����A�����R���p�N�g�H�ɂ��Ă݂܂����B�@���������悭�A�Q���̃u���������Ƃ`�c�b�œd���Ƃ��ēǂݍ��߂Ă��邱�Ƃ��m�F�ł��܂����B�@�����p�I�ɂ́A�Q����8,000�~��Ŏd�オ���Ă܂��B�@OPAMP
��1IC���ɂQ�����Ă� LM358M ��I��ł܂��B
 |
�@�����x�Z���T�ł����A�ǂ����莝����APA300 �����Ă��܂����݂����ŁA�P���ȑ�����H�Ɍq���Ă��s�N���Ƃ��������Ȃ��������߁AACB302 �ɐ�ւ��ĉ�H�v���Ă݂܂����B�@ACB302 �͓����Ŋ�d�ʂ����Vcc�̔����ɐݒ肵�A����𒆐S��+/-100mV/G �̏o�͂��o���̂ŁA10�{���x�ɑ����ł���A+/-1V/G �̕ϓ��������邱�ƂɂȂ�܂��B�@4��OPAMP���g���āA�P�͊�d�ʍ��A�c��R�� X,Y,Z �R���̑����ɂ��܂��B ��d�ʂ͂P�ŋ��p������`�ɂ��܂������A���Ɋ��͖����݂����Ȃ̂ŁA����ŗǂ��Ƃ��Ă����܂��i���ۂɃ��{�b�g�ɓ��ڂ���Ƒ��̃m�C�Y������Ă���Ƃ������������ɂȂ������͊����܂��肩���m��܂��A�\�t�g�E�F�A�Ńt�H���[�������Ǝv���܂��j�B�@GND���P�ӏ������ł��Ă܂��A���C���[�łȂ���`�ɂ��܂����B
 |
�@��W�� ROBO-ONE ���̂��Ƃ��ڂ������\����Ă܂��ˁB�@�u�Ƃɂ�������v���L�[���[�h�H�@����̒�`�͉��Ȃ낤�H�@�������ɕ����Ă���A�Ƃ������Ƃł��傤���B
�i�Q�O�O�T�N�U���Q�U���j
| �i������Ɨ]�k�j ����Ŏg���Ă����v���o�C�_��ύX���܂����B ���\���K�ł��B ���̃^�C�~���O�ŁA�v�����T�[�o�����������݂����ł��B �ق�ƁA���������A�Ƃ��������ł��B �����ŁA��C�ɃA�b�v�f�[�g�ł���Ɨǂ������̂ł����A ��p�s������A�k���ɍs�����肵�Ă����̂ŁA �x�݂̓��͑̂��x�߂�̂Ő���t�ł����B�B�B ����Ȓ��ł��Adenno_ono����̑I�蔲���ɑI��Ċ��ł��܂����B �W���C���ł����ǁA�U�^�Q�U���L�Ɏ��ۂɓ���������悹�Ă����܂����̂ł��Q�l�ɁB |
�i�Q�O�O�T�N�V���V���j
�@������V��������Ă݂܂����B�@�O���̑O�ɍw���������̂Ȃ̂ł����ABestTech�� BTC080 (SH2/7145F) �ɂ����̂ł��B�@�A�[�g���[�N�ɈӊO�Ǝ��Ԃ��|�����Ă��܂��āA�܂��A�����x�Z���T�ƃW���C���i�U���Q�U�����Q�Ƃ��������j�𓋍ڂ��Ă܂��A�傫���I�ɂ̓��{�b�g�{�̂��傫���̂œ��肻���ł��i80mm���j�B�@���̑��̃Z���T�n�Ƃ��ẮACDS�ɂ������m�͓��ڂ��悤�Ǝv���܂��B�@CPU�\�͂�����Ȃ��̂ŁA������摜�����͌�����Ƃ��܂��B
�@���� ROBO-ONE ���܂ł���قǗ]�T������킯�ł��Ȃ��̂ŁA���낻��O��Ɠ������Ƃ����Ȃ��悤�ɂ��邽�߂ɁA�d�l�����߂Ă�����Ǝd�グ�Ă݂悤�Ǝv���܂��B�@��U�A�I���W�i���T�[�{���ȂǃX�g�b�v���Ă������Ǝv���܂��i���A��邾���n�}�b�e���܂��̂Łj�B
�i�Q�O�O�T�N�V���P�O���j
�@�R�A�x�̏����́A����ς�A�[�g���[�N���Ă��܂��܂����B�@CPU�{�[�h�ɃW���C���Ɖ����x�Z���T�AEEPROM
�����Ă݂܂����B�@�m�C�Y�Ȃǂǂ��Ȃ�̂��킩��܂��A�����͎��ۂɍ���Ă݂ē���`�F�b�N���Ă݂����Ǝv���܂��B�@�R�A�x�A�\�t�g�E�F�A�̈ڐA�܂łł�������Ȃ��B�B�B�@�d�l�I�ɂ�
3.3V�f�o�C�X�œ��ꂷ�邱�ƂŁA�u�ԓI�ȓd���~���Ȃǂɂ̓}�[�W�����ł����Ȃ����ȁH�Ɗ��҂��Ă܂��B�@���Ƃ́A��Ȃ�ł͂̎��Ȗ����̒Nj��A�O��I�ȃI���W�i���B
�@���ƁA�厸�s�����Ă܂����B�@�ĕt�����闼�ʊ�̃T�C�Y���Z�� 75mm �������̂ŁA80mm��
�� 80x75mm2 �ɋ}篕ύX���܂����B
 |
|
�@�`�m�`���y�V�X�[�p�[�|�C���g�Ń��{�b�g�����ւ��傱���Ƃ����p�[�c���B�@SISO����Ƃ����g�����Ƃ���Ă��鍂���ȃ��C���[���Ăǂ��������̂��낤�H���Ďv���āA�������Ă݂܂����B�@�X�[�p�[�|�C���g�ɂ��w���Ȃ̂ŁA�C�y�ɔ����Ă��܂��܂������ǁA���҂��Ă܂��i���A��������܂����B�����ɗ��|�e���V�����[�^�ɍɂ��Ȃ��Q��������҂��Ƃ̂��ƁB�����ł��Ȃ��悤�ɂ����ƃ}�X�N���ė~���������B�B�B�j�B
�i�Q�O�O�T�N�V���P�U���j
| �i������Ɨ]�k�j �ƒ��A���ׂ��炯�B�B�B �����_�E�����ĂQ���ځB ����� RoboOne ����ˍ��R�@�ł����A ���҂��Ă�����Ђۗ̕{�����O��Ă��܂������߁A�h���Ȃ��I ���āA�ǂ����悤�B�B�B |
�i�Q�O�O�T�N�V���Q�Q���j
�@�v���Ԃ�̒����A�x�ɂȂ�܂����B
�@�E��S�̂����z���Ƃ������Ƃ������āA���̘A�x�͏o�Ђ��Ă��d���ɂȂ�Ȃ��A�Ƃ������ƂŁA��������Ƌx�܂��Ă��炨���Ǝv���܂��B
�@�����͏H�t���֔������B�@�R�������x�Z���T�̗\���ƃv�����g��̌����t�B�@�ǂ����ŋߓK���Ɏ��������Ă��܂��Ă�ׂ��A���镔�i�������Ă��Ă��܂��܂����B
�@�Q���ځi�����j�́ABTC080(SH2/7145�j�Ƀ\�t�g�̈ڐA�B
�@BTC070 -> BTC080 �ֈڐA����Ă�����A�����Ɠ������ƂɃn�}�b�Ă��ł��傤�ˁB�@BestTech ����̃w�b�_�Ŋ��荞�݊��̖��O���ύX�ɂȂ��Ă��āA���܂����荞�ݏ����������Ȃ��A�Ƃ������́iRenesus����̎x���w�b�_���匳�H�j�B�@�R���p�C���̓G���[�A���[�j���O�Ȃ��Ȃ̂ŁA�ꌩ�A�����Ɠ����Ă���悤�Ɍ�����̂������x��̌����B�@���ꂵ�ė~���������B�B�B
| BTC070 SH2/7047�p |
#pragma interrupt int_tgia_0
void int_tgia_0( void ) // MTU0.TGRA �̊��荞�ݔ���
{
// ���荞�ݏ���
}
|
| BTC080 SH2/7145�p BTC050 SH2/7045�p |
#pragma interrupt int_tgi0a
void int_tgi0a( void ) // MTU0.TGRA �̊��荞�ݔ���
{
// ���荞�ݏ���
}
|
���ɔ����ȍ��Ȃ̂ł����A���荞�݊����� int_tgia_0() �� int_tgi0a()
�A�܂�A���� a_0, 0a �Ƃ��ς���Ă܂��B
�Ƃ�����ցH��˔j�ł��A�����ɂQ�S�{�� PWM ���o�͂��\�ƂȂ�܂����B
�i�Q�O�O�T�N�W���P�R���j
| �i������Ɨ]�k�j 7 / 16 �̉�H�}�ʂ��ŏI�łɓ���ւ��܂����B |
�@�����Ƃ��āE�E�E
�@3.3V ADC ���g�p���Ă�����ŁA�o�b�e���[�̓d����ǂ݂Ƃ邽�߁A���L�̂Ƃ����R���Q�g�����Ƃɂ��܂����B
 |
|
�@��8�� ROBO-ONE �̃G���g���[�����B�@�G���g���[�ԍ� 20 �ԁB�@���x�́A�����Ɨ\�I���i�R�����炢�̓p�X���������̂ł��B
�i�Q�O�O�T�N�W���P�T���j
�@���N�� 3/6 �ɏ����� PG-03 �̃I�t�Z�b�g�ł����A���̂Ƃ��Ɏ�����f�[�^���Љ�Ă��Ȃ������̂ŁA�����Ă����܂��B�@�c���ł���24.576MHz ��16�����ł̃J�E���^�ł̒l�ł��B�@KO KRS-2346ICS �Ȃǂɐڑ����Ďg���ꍇ���ƁA1�x��13.6�J�E���g�ɑ������܂��B�@���̃Y�����傫���Ǝv�����A�������Ă悢�A�Ǝv�����̓��[�U�[����Ƃ����Ƃ���ł��傤���B�@�ԁA�̂Q�̃O���t������̂́A�Q�����̃f�[�^�Ƃ������ƂŁA������Ƃ�������i�Q�C�������Ȃǁj�Ŕ������Ă�����̂Ǝv���܂��B�@ROBO-ONE �̑��̂悤�ɐ����Ƃ������Ԃł���A��P�x�Y������x�Ƃ������Ƃł��B
 |
���삷��̂Ȃ�A����ȏ�̐��\��悤�ɂ��Ȃ��Ƃ����Ȃ��A�Ƃ����w�͖ڕW�����܂����Ƃ���ŁA�܂��A�v�����邱�Ƃɂ��܂��B�B�B
�i�Q�O�O�T�N�W���P�X���j
���l�v�Z�ł��V�т��Ă܂����i�P�F�O�O�j�B
�e�[�u����p���ĎO�p������������������@������܂����A0.1�x�̊p�x�܂Ő��x���グ��ƁA�e�[�u�����c��オ���ă��������������Ă��܂��A�Ƃ������ƂŁAsin����3��,��
cos����4�����Ōv�Z�����邱�Ƃ����Ă݂܂����B�@SH2/7047F 50MHz �̏ꍇ�ABestTech����x������Ă郉�C�u�����Ƃ̔�r��sin����
40%�̎��ԂŁi60%�Z�k), cos����45%�̎��Ԃʼn��Z���ł��܂��B�@�����̂�����́A�����Ă݂Ă͂������ł��傤���B�@�i���L�Fcos����sin���ɔ�ׂ�1.3�{���Z���Ԃ��������Ă��܂��܂��B�@�܂��Agcc
�R���p�C���� -O2 �œK�������{���A���Z�� double �^�ōs���Ă܂��B�j�@�⑫�ł����Asinf,
cosf �Ƃ��� float �^�p�̊����p�ӂ���Ă܂����A����͊撣���Ă܂��B�@sin��,
cos���ɔ�ׂāA64%�̎��ԁi36%�Z�k�j�A62% �̎��Ԃʼn��Z���I���܂����B
| sin(x) = ��{ (-1)n x2n+1 / (2n+1) ! } = x - x3/6 cos(x) = ��{ (-1)n x2n / (2n) ! } = 1 - x2/2 + x4/24 |
���̓W�J�܂܂��ƁAsin����37�x�ȏ�, cos����53�x�ȏ�ŗL����4�������荞�݂܂��̂ŁAsin(x)=cos(90�x-x) �𗘗p���ĕϊ�����Ɨǂ��ł��傤�B�@���ƁA�������Z�ōs�������ꍇ�́A�덷�������Ȃ����x�� 10000 �{�̒l�ōs���ƌ�������덷���������Ă��Ȃ��悤�ɂ݂���̂ł悢���Ǝv���܂��B�@�i���F x �̒P�ʂ̓��W�A���ł��B�@�ϊ����̃̌������\���ɏグ�Ȃ��Ɛ��x�������܂��j�@����ɍH�v�����ĂP�U�i���ʼn��Z�������悤�ɂ���ƁA���������ł����ł��傤�ˁB
���l�v�Z�������ėV��ł��ċC�����܂����B
��L�����͖��Ȃ��������̂ł����AC ����̎d�l�Ɉ����������Ă��܂��Ă܂����B
gcc DevLite ���Ɗ��̈����� double �^�ł����Ă��A�������̉��Z�� int �^���m����
double �Ɋg������͈̂����Ƃ��Ċ��ɓn���Ƃ������ϊ������݂����ł��ˁB
Microsoft C ���ƁAdouble �^�ɕϊ�������A���Z�����āA���Z���ʂ� double
�^�̂܂܈����ɂ��Ă�݂����ł��B
PC��Ŋe�T�[�{�̊p�x���o�͂����ăO���t�ɂ��Ė��Ȃ��������̂��A���@�e�X�g����Ɖ��Z�~�X���Ă�݂����������̂ŁA�킩��܂ŔY�݂܂����B�B�B
���j�@���������ƁAf ( x / ( L - z ) ) �ŁAx, L, z �� int �^�̏ꍇ�AL-z
�͖��Ȃ��Ax/(L-z) �����Z�����Ƃ��ɁA�����_�ȉ��� int �^�̏ꍇ�����Ȃ�Adouble
���Ƃ����� f()���ɓn�����A�Ƃ������Ƃł����B
�i�Q�O�O�T�N�W���Q�O���j
�܂��܂�������߂Ȃ��ŁA����肽���B�@�C�������{�b�g�����n�߂ĂQ�N���o���܂����B
���[�V������Ԃ��������ł��B�@���[�V�����v�Z��12msec.���P�Ƃ������ԂŌv�Z����ꍇ�A���Z��
long �ł� over-flow ����̂ŁAlong long (64bit) ���g�p���邱�Ƃɂ��܂����B
12msec. �́A�T�[�{��������������̂ł����A���ʓI�� CPU ���t�^���w�ɂ��T�[�{�p�x�v�Z�A��Ԍv�Z���\�Ȏ��Ԃł����B�@�t�Ɍ����A�v�Z�������グ�Ȃ�����A��CPU�ł͑��̂��Ƃ��ł��Ȃ��A�Ƃ����߂����ł��B
 |
1�����`��Ԃ��Q���A�Q�����R���Ƃ������ƂŁA�R����Ԃ��s�����Ƃɂ��܂����B�@���ہA�p�x�A�ʒu�Ƃ����ϐ����ɑ��āA���x�A�����x���l�����ă��[�V�������Ԃ���킯�ł�����A�R�����Ó��ł��傤�B�@�ꉞ�A�N���オ�胂�[�V�������Ԃ��Ă݂�ƁA�S�T�[�{��PWM�l�̓����͏�}�̂悤�ɂȂ�܂����B�Ō�̂P�^�T���x�̊Ԃ́A�N���オ������̈���҂����ԂƂ����Ƃ���ł��B
�i�Q�O�O�T�N�X���X���j
���T�[�o���s����Ȃ��߈��z�������܂��B�@�` http://hw001.gate01.com/n-okada/ �`�@�u�b�N�}�[�N�̕ύX�����肢���܂��B��
�@������ɂ�荡��� ROBO-ONE �͊��S�Ɋ������܂����B�@�Ƃ肠�����A�������̏�Ŏv�������葖�点�Č��܂����B�@�ꉞ�A�����s�܂Ń��A���^�C���v�Z�łł���悤�ɂȂ�܂����i�W���C���Z���T�����j�B�@�肵�āA��l�ڂ����� ROBO-ONE �\�I�B
 <�摜���N���b�N����Ɠ���ɂȂ�܂�> |
�@�ˉ�i���q�G���������Q�j�����߂č��M�ɂ��Ȃ���Ă���̂ŁA�ŕa��P�ʼn߂����܂��B�B�B�@�����l�ŁA���S���܂����B
�i�Q�O�O�T�N�X���P�X���j
�@�������̃p�[�c����蒼���Ă݂܂����B�@�Њ������o���Ⴂ�܂������ǁA�܂��܂����[�V��������������̂ŁA�����ڂ����ł��B�@���ɒ����n�������Ă������Ă�����킯�ł͂Ȃ��̂ł����A����Ă݂�ƈ��芴���ł܂����B�@���ƁA�r�̃T�[�{���Q���A�y�����Ă݂܂����B
 |
 |
�@�܂��܂��A�A���~����ċȂ��Ă��A�R�b�s���O�\�[�ƃe�[�u���~�j�h�����A���͂ō�����̂ł����AROBO-ONE
���݂āA�n�߂悤�I�Ƃ�����������������Ǝv���܂��̂ŁA�|�C���g���������Ă����܂��i�Q�O�O�S�N�Q���Q�W���ɂ������Ă���܂��j�B
�@A5052 �Ȃǂ̍d���A���~���Ȃ���ꍇ�A���ɁA���u�𗧂Ă����ꍇ�A���͂ŋ���ł���ʒu�����ꂽ�肵�āA�Ȃ����Ă��܂����I�Ƃ��������Ƃ�����܂��B�@���̏ꍇ�́A�Ȃ��������ɑ��āA5mm�Ԋu���炢��2mm�ӈȉ��̃h�������g���āA�̔�������ђʂ��邭�炢�܂Ō����J���܂��B�@�Ǐ��I�ɔ����炩������Ƃ������Ƃł��B�@�����Ȃ������ɉ����āA�Ȃ���̂ŁA�������͂ŗ}����ʒu������Ă��A�����ƋȂ���܂��B�@�ђʂ����Ă��܂��ƁA�o�����łāA�������������̂��ʓ|�ɂȂ�̂ŁA���̕��@�������߂��܂��B
�@�i�|�C���g�j�~�j�h�����Ō����J���Ă����Ƃ��ɁA�ӂ��ƌy���Ȃ�u�Ԃ�����܂��B�@���̂Ƃ��A�h�����̐�[�����ђʂ���u�Ԃł��̂ŁA�����Ŏ~�߂܂��B�@�@����ƁA�ђʂ��Ȃ��̂ŁA�o�����łȂ��̂ŁA�㏈���s�v�Ŋy�ł���B
�i���́A�Q�T�U�i�W�S���[�j�̑��́A�ђʂ����č�����p�[�c���P�ł��Ă��܂����̂ŁA�����ڂ����낦�邽�߂ɁA�S�Č����J���ċȂ����s���܂����B�@���\�A�o�����Ŏ��Ԃ��g���Ă��܂��܂����B�j
�i�Q�O�O�T�N�X���Q�S���j
�@����ɑ����āA�A���~���H�B�@�����̓q�W����������Ă��܂����B
�@������t�����ŏ����Ă����A�Ȃ��̃|�C���g�̎ʐ^�����Ă����܂��ˁB
 |
 |
 |
���ʐ^�́A�A���~�ɐ}�ʂ���������V�[����\��t�������́i�E�j�A�V�[���ɏ]���Č������������́i�����j�A���̗��ʁi���j�ł��B�@�����̎ʐ^�́A�������̕\���ɂȂ�܂����AH�^�ɋȂ��̂��߂̔��J���������邱�Ƃ��킩��Ǝv���܂��B�@������݂��Ƃ��ɁA�Ƃ���ǂ��댊���J�������Ă���Ƃ��낪����ł��B�@�����āA��ԉE���̎ʐ^���Ȃ����s������ɂȂ�܂��B�@���J����Ԃ̌��͋Ȃ��邱�ƂŔ��Α��܂Ŋђʂ��邱�Ƃ�����܂����A�ŏ������炠���Ă��������A�o���̏��������Ȃ��Ă��ޕ������y�ł��B
�@�Ƃ���ŁA�����A�r�̒��������߂悤�Ǝv���āi�������t�ł���ˁA���ʌ��߂Ă�����H����̂ɁE�E�E�j�A���낢��ƌ��ĉ�����̂ł����A����I�Ƃ����Ęr�̒����́A��������ׂ��A�Ƃ����̂��Ȃ��ł��ˁB�@�W���I�ɂ́A������ԂŁA�q�U���炢�܂ł̒����ɂȂ��Ă�����̂��������ȁH�Ǝv���܂����B�@OmniStriker (�O�c����j�̂́A�L�яk�݂��邵�AARUMO-SiR �iSISO����j�̂́A��悩��A�q�W�̕����������Č�������܂ł��邵�i������ł��傤���j�AROBO-ONE �K��ɂ́A�S���̉����ȓ��Ƃ������ĂȂ����i�ƁA����Ƃ������Ă��܂��ƋK���ɓ������Ⴄ���ȁH�j�B�@�i������̂Ȃ�A��������A��������A�r��U����肷�邱�ƂŁA�������Ȃ���A������ł��L���Ă��悢�悤�ȋC�����܂��B
�@�Ƃ������ƂŁA�r�i��j�̒��������߂�Ȃ��̂ŁA�����Ȃ��̌^�ł���̂ł����A��̎ʐ^�̂悤�Ƀq�W������������āA���܂ł̕����͌����ł���悤�Ƀp�[�c���ׂ������č�邱�Ƃɂ��܂����B
�i�Q�O�O�T�N�X���Q�T���j
�@KO �̐V����HV�^�C�v�̃T�[�{�ɂ��āB�@���_�́A�~�����I�@�ł��B
�@HV �^�C�v�̃T�[�{�́A�S���������Ă��������A�Ƃ���̂ł����A����́A����{�[�h�̎d�l����Ȃ̂��ȁH�Ǝv���Ă��ł����A�ǂ��Ȃ�ł��傤�H
�@�ǂ��ɂ������������ڍׂ��Ȃ��̂ŁA��������A����{�[�h�܂ō��ς��A�Ȃ�Ă��ƂɂȂ������ρB
�@�T�[�{���Ɉ���d����ς�����̂ł���A��肪�Ȃ��̂��A����M�����̂��̂���������Ȃ̂��A�ڍׂɏ����Ă���h�L�������g�Ȃ����Ȃ��B�B�B
�@�u����v������Ďv���̂��A�q�U�̃g���N�ƃX�s�[�h���~�����A�Ƃ����Ƃ���ł��傤���B�@���������ł��A�g�u�d�l�ɂ������ȁA�Ǝv���Ă����肷��̂ł��B
�@�ǂȂ����A�������������I
�i�����̃��{�b�g�쐬�Ɋւ��Ă̂��Ƃ��������Ǝv�����̂ł����A�f�W�J�������o�������Ȃ̂ŁA���T�ɉ܂��B�j
�i�Q�O�O�T�N�P�O���Q���j
�@�j�n�̂g�u�d�l�T�[�{�ɂ��ď������Y�������炢�������܂����B�@���肪�Ƃ��������܂��I
�@�L�����N�^���X�e�B���O�`�F���W�ł̃^�C�~���O���]���̎d�l���i��荂���ł���A�Ƃ������Ƃ������ł��B�@���݂�����ꍇ�A���ӂ������ł��ˁB
�i�Q�O�O�T�N�P�O���T���j
�@��T�A�B��Ȃ������摜�ł��B�@�T�[�{�̕Ў��������Ă��郈�[�������ł��B�@ABS/�v���X�`�b�N�̏d�˔Ŏ��u����}���Ă�̂ƁA�l�W�̓�����]���鑫�ɓ�����Ȃ��悤�ɁA�P���̔�(3mm���j�Ƀl�W���T�C�Y�i��6mm��)�̌����J���āA�����̔iABS1mm�j�̓l�W���Ƃ���3mm�ӂ̌����J����悤�ɂ��Ă܂��B�@CNC�Ƃ����f���[�������ĂȂ��̂ŁA����ȍH�v�œ����Ă܂��B
 |
�@KO�� Web �����Ă��āi�����j�C�������̂ł����AKRS-2346ICS RedVersion �� KRS-2350ICS RedVersion �ł̓g���N���������ł��ˁB�@2350��10%������ 22.0kgcm �Ƃ̋L�ڂ�����܂����B�@�����ƁA���l�̂Ƃ����ł� 20.0kgcm �Ə����Ă������̂ŁA�����Ǝv���Ă܂����B�@���A�o���ōw������ 2350 ������̂ŁA�q�U�Ƃ��̂��̂́A������ɒu���������Ă��������ȁB�@�����ς�����낤�B�B�B
�i�Q�O�O�T�N�P�O���W���j
�@���N�O�ɔ����� GWS Micro 2BBMG �ɉ����Ă݂��B�@�A�i���O�T�[�{���L�� PWM �����ɂ��킹�ăg���N���ς��܂��ˁB�@����ǁA���������C�ɂȂ����̂��A�ُ�ɔM���Ȃ邱�ƁB�@KO �̃T�[�{���g��������ƔM���Ȃ�܂����ǁA2BBMG �͐��b�ňُ�ɔM���Ȃ�܂����B�@������āA�g�������Ԉ���Ă�H�H
�i�Q�O�O�T�N�P�O���P�O���j
�@�v���Ԃ�ɏH�t���ցB�@KO HV�d�l�T�[�{������O��Li-PO 11.1V�d�l�����Ă��܂����B�@3�Z���d�l�ɂȂ邽�߂ɁA�[�d�킪�]���̂��̂��g���Ȃ����Ƃ��킩��܂����B�@�o�����V���O�Z���T�[���Q�{�K�v�ɂȂ�킯�ł��B�@7.4V�Ή��̂��̂ł́A�莝���̂��̂͂P�{�����Ȃ��B�B�B�@�[�d��́H�Ƃ����ƁA�Q���~������B�@���̒��A������������d�g�݂ɂȂ��Ă��܂��ˁB
�i�Q�O�O�T�N�P�O���Q�Q���j
�@���R�����āAmips �p�̃N���X�R���p�C����������Ă݂܂����B�@�ȉ��A�o�������B�@�v�X�� unix ���Ō˘f�������ς��ł����B
�@�����́A�R���p�C���܂ŁB�@���ۂɓ������͌���B
�i�Q�O�O�T�N�P�P���P���j
�@mips�p�̃R���p�C�������������B�@�����Ƃł����݂����B�@�����ǁA�܂��A�e�X�g�ΏۂƂȂ�J�����̃{�[�h���Ȃ��B�B�B�i�O�������ڕW�͔N���j
�@�ꕔ�A11��1���̋L�ڂɌ�肪�������̂ŁA�������Ă����܂����B�@gcc �� configure
�ŋ�J���܂������ǁA���Ƃ��ł��܂����B�@���ƁAgcc �̃t���Z�b�g���Ɖ��̂�
make �����S�ɏI���Ȃ������ł��B�@c++ �͂��܂��R���p�C���ł��܂���ł����B
| �i������Ɨ]�k�j KRS-4024HV �̐}�ʂ� KO Web �Ɍ��J����Ă܂��ˁB �N���������\������Ă��� 40kg�Ecm�̃T�[�{�������T�C�Y�Ȃ̂ł��傤���B ����Ńt���[�������͂��߂ĔN���ɂ͍w���A�g�ݏグ�A�J�����̃{�[�h�� �g�ݍ��킹�Ă݂����Ȃ��B ����ǁA���@���������A�ƍl����ƁA���ʂȎ��Ԃ�����邾�������Ȃ��B KO ����A���O�Ɏ����T�[�{�̊O���Ƃ����J���Ă���Ȃ����Ȃ��B �ƁA�����T�[�{�������������̂ɍl���Ă��܂��Ă�̂ł����B�B�B |
�i�Q�O�O�T�N�P�P���R���j
�@BestTechnology����̂Ƃ����� GCC Developer Liet ���o�[�W�����A�b�v���ꂽ�̂ŁA�_�E�����[�h���Ďg���Ă݂܂����B�@7145.h ���ȉ��̂Ƃ���ŕs�������܂����̂ŁA�������������܂����B�@�ϊ��O�t�@�C���ƕϊ���t�@�C���� diff ��������̂��L���Ă����܂��B
1: 2004c2004 2: < #ifndef SYSCLOCK32M 3: --- 4: > #ifdef SYSCLOCK32M |
7145.h �� 2004�s�ڂ���L�Q�s�ڂ���A�S�s�ڂ̂悤�ɁA#ifndef �� #ifdef �����ւ���`�ŏC���ł��B
�ŏ��A�R���p�C�����Ă����̂悤�ɒʐM�����Ă����̂ł����A�������������������Ă����̂ŁA�n�[�h����ꂽ�̂��Ǝv���Ă��܂��܂����B
����̃o�[�W��������f���A���f�B�X�v���C�Ή����Ă���Ă���̂́A�Ƃ��Ă�������܂��i���̃L�[���[�h�����ŃA�b�v�f�[�g���Ă��܂��܂����j�B
�Â��ăn�[�h�E�F�A�֘A�B�@�P�P�����̃g�����W�X�^�Z�p p.128 �ɂ���e�N�j�b�N���g���āA�P�d���Ń��{�b�g�����Ȃ����ȁH�Ǝv���āA���킵�Ă݂܂����B�@���ʁA������߂ĂQ�d�����ɖ߂��܂����B
 |
���킵�����e�������Ƃ��Ďc���Ă����܂��B�@�������Ƃ����Ă��܂������Ȃ̂ŁB
| ��R R1 | �d�ʍ� |
| 22�� | 2.00V |
| 4�� | 0.70V |
| 2.5�� | 0.49V |
�i�Q�O�O�T�N�P�P���U���j
�@BestTech ����̂Ƃ����ŏ�L GCC Developer Lite ��7145.h �t�@�C���ύX���s���܂����ˁB�@denno_ono ����̂Ƃ����Ɏ��グ�Ē��������ʂł��傤���ˁB�@���邱�Ƃ͗ǂ����Ƃł��B�@�����A�ǂ��������Ă����Ȃ�ABestTech ����̃g�b�v�y�[�W�� rev.12 �� rev.14 �ɂ��Ăق��������A�Ǝv���͎̂��������H
�i�Q�O�O�T�N�P�P���W���j
��ށI�j�@���{�b�g����M�p�� X'tal �ł����A���̂� 40.770MHz ���Ƃ����Ǝ�M���Ă���Ȃ��̂ł��B�@���̂ł��傤�B�@40.810MHz, 40.850MHz �͂n�j�ł��B�@�ǂȂ��������m����܂���ł��傤���H�@CPU �̎��g���ƊW������̂��Ȃ��B�B�B��m�C�Y�H�i���Ȃ݂ɁA�N���X�^���́A�ǂ���m�[�}���B�@�f���A���R���o�[�W�����Ƃ����̂������ł���ˁB�@������ĉ����Ⴄ��ł���j
�i�Q�O�O�T�N�P�P���P�R���j
�v���Ԃ�̘A�x�B�@�A�x�O�ɂ��Ă��傱���ƑO�i�B�@�T�[�{�̃X�s�[�h�A�b�v�I
�ʐ^�Ŕ����F�̃P�[�X�ɓ����Ă�̂��A�I���W�i���i�B�@�E��KRS-2350�B�@����p�x�́}90�x�ł��B�@�o�b�e���[��6.2V���x�ł����̂ŁA7.4V�ɂ���A�������������Ȃ�͂��B�@��r�Ō��ė~�����Ƃ���ł��i�摜���k�̂��������܂����R�c�����߂��ŁA�c�����c���Ă��܂��Ă܂����摜�Ȃ����܂����B�@���т��ъ����`���ł��傤���B�j�B
 <�摜���N���b�N����Ɠ���ɂȂ�܂�> |
�i�Q�O�O�T�N�P�P���P�W���j
�@���q�U���T�[�{�i�Q�j���I���W�i���i�ɒu�������B�@�g�R�g�R�ۂ�ROBO-ONE���̃A�N�V�f���g���C�ɂȂ��Ă����̂ŁA���������̃p�[�c��⋭�������B�@���̂Ƃ��茳�������āA�h���C�o�[�Ŏ���h���Ă��܂��܂����B�@���ǁA�肪�ɂ��āA�g�ݏグ�āi�����������g�����Łj�I���B�@����̃T�[�{�̉摜�f�[�^�����ւ����Ă����܂����B
 |
 |
|
|
�i�Q�O�O�T�N�P�P���Q�O���j
�@40kg�Ecm �̃T�[�{�ɂ��āA�����܂��烁�[�������܂����B�@�P�Q�����{�ȍ~�ɗ\�ł���悤�ɂȂ�Ƃ��B�@
�@�@�@�EKRS-4014HV ICS Red Version �̎d�l
�@�@�@�@���d���d���F9V�`12V ���g���N�F40.8kg�Ecm ���X�s�[�h�F0.19sec/60��
�@�@�@�@���ő哮��p�x�F270�� ���T�C�Y/�d�ʁF43�~32�~32.5mm/65g
�@�@�@�@���\�� \16,800(�ō�)���炢
�@����p�x���L���̂͊y���������ɂȂ肻���Ȃ�ł����ǁA�X�s�[�h�����̂������Ȃ��Ă܂����ˁB�@�X�s�[�h�A�~�����Ƃ����������������̂��Ȃ��B
�@�ΘJ���ӂ̓��B�@�v�X�ɂ������ƃf�B�Y�j�[�����h�ցB
 |
�@���Ƃ́A�Y�ꂸ�AStarWars Episode�V ��DVD���B
�i�Q�O�O�T�N�P�P���Q�R���j
�܂��܂��A�E���������B
�Q�[���@�̃R���g���[�����Փ��������Ă��܂��܂����B�@4k�~��B
 |
|
 |
 |
PS�R���g���[���̎d�l�ɂ��ẮA���L����\�I�ȃT�C�g�̂悤�ł��ˁB
���ۂɁA���{�b�g�ւ̓��ڂƂ����̂́A�̂₳��̃T�C�g�̃R�R���ǂ��ł��B�@�����̒ʐM���@�̂͂��߂� SCI �ōs���A�Ƃ����̂��Љ��Ă�̂ŁA������̕����g���C���Ă݂悤�Ǝv���܂��B
�i�Q�O�O�T�N�P�P���Q�V���j
�����x�Z���T(ACB302) �́u���I�v�����x�Ɓu�ÓI�v�����x�ɂ��Ē��ׂĂ݂܂����i�P�ɂ`�c�b�̒l���O���t�ɂ��Ă݂������j�B�@�c���͂`�c�b�l�A�����͎��Ԃƍl���Ă��������i�P�ʂ͓K���ł��j�B
 |
�R�����O���t�ɂ��Ă܂����A�����̃s���N���n�ʂɐ��������ɂȂ�܂��B�@�������t�B���^�Ƃ����ɓ���ĂȂ������p��ŕ]�������̂ŁA�m�C�Y������͖̂������Ă��������B
�n�߂ɂQ��قǁA�c�ɐU���āA���͉��ɁB�@����ŕ��邱�Ƃł����A�W���C���Z���T���g��Ȃ��Ă��A�R�������x�Z���T�ŁA�u���I�v�����x�Ƃ����̂���荞��ŏ�������悤�ɂ���A���̂��u�����ꍇ�A���Ƃ��A�W�����v�������ɁA�q�U���Ȃ���Ƃ��ŃT�[�{�ւ̕��S�����点���Ȃ������Ďv���܂����i���́A�t�ɃW�����v���ăq�U���Ȃ���A�Ƃ����̂𑫗��Z���T�ł͂Ȃ��āA�����x�łł��Ȃ����H�ƍl���ĕ]���������̂��A����ł��j�B
���Ƃ́A���́A���̃T�[�{�ŁA���{�b�g�̃W�����v���ł��邩�H�ł��ˁB�@�i�������t���ȁH�H�@�܂��A�������ǂ��ł��傤�B�j
�g�u�d�l�̃T�[�{�������Ă�l�ŁA�s�����s�������˂邱�Ƃ��ł��郍�{�b�g���������̕��A�g���C���Ă݂ă��|�[�g���Ă��炦��ƁA���ꂵ���Ȃ��B
�i�Q�O�O�T�N�P�P���Q�X���j
�Q�[���R���g���[���̃f�[�^��M���ł���悤�ɂȂ�܂����B�@�v���O�����A�z����F�X�Ɗm�F���Ă����̂ł����A�P�Ƀv���A�b�v��R�����Ă��Ȃ��������߂ɓ��삵�Ȃ��A�Ƃ������̂ł����B
�i�Q�O�O�T�N�P�Q���P���j
���낢��Ǝ����������������A�Q�[���R���g���[���� CLK �M������ꂽ�B�@CPU
�������Ă��܂����݂����B�@�ň��B�B�B
�C����蒼���āA�ʃs���Ńg���C�B�@�ǂ����A��ꂽ CPU �����B�B�B�i���āA���\������ł����ǁA7145F�j�B
�I�V���Ō��āA������ CLK ���o�Ă���̂��m�F�B�@�悵�B�@�����ƒʐM�ł������ȁH�@�{�^���������Ă��A�A���Ă���f�[�^�������B�@���������B�@���Z�b�g�B�@�����H�@�S���r�b�g���P�ɁB�@���A�܂��A��ꂽ�B�B�B�@CLK�[�q���āA���\�d����K�v�Ƃ��Ă�̂��ȁH�@�����͂�߂��ق����悳�����i���āA�����B�B�B�j�B�@
74HC08��ʂ��Ă݂��B�@���肵�Ă���B�@���I�@�R���g���[���� MODE �X�C�b�`�������āA�A�i���O���[�h�A�����P���āE�E�E�@����H�@���͂�Hi��Ԃ������B�B�B�@�܂��A���S���Ȃ�ɂȂ��Ă��܂����B�B�B�@CPU
�̕����ʖڂɂȂ��Ă�B�@���������H
�i�Q�O�O�T�N�P�Q���S���j
�Q�[���R���g���[���� CLK �͉��Ă��Ȃ������悤�ł��B
�C�����߂ĕ�CPU�ɂȂ��ăv���O���~���O������A���Ȃ�����B�@����� CPU
�� R8C/11-21114FP �ōs���Ă݂܂����B�@����A3.3V���삷�邵�A�S�[�q�ɑ��ăv���A�b�v��R��������Ă邵�ƁA�n�[�h�쐬�͊y�ł����i�I���W�i���T�[�{�p�ɂƎv���Ă����̂ł����A�ėp�������̂ŁA�d�����ł��j�B�@�̂₳��̂Ƃ���̂��܂˂č���Ă܂��B�@CPU��I/O�ݒ�Ȃǂ͏ȗ����Ă܂��B
1: #define MAX_RECIVE_DATA (21)
2: #define DSC2_LOOP (4)
3:
4: unsigned char ReciveData[ MAX_RECIVE_DATA ] = {0};
5:
6: unsigned char CONFIG_MODE_ENTER[] = { 0x01,0x43,0x00,0x01,0x00,0x00,0x00,0x00,0x00 };
7: unsigned char QUERY_MODEL_AND_MODE[] = { 0x01,0x45,0x00,0x00,0x00,0x00,0x00,0x00,0x00 };
8: unsigned char SET_MODE_AND_LOCK[] = { 0x01,0x44,0x00,0x01,0x03,0x00,0x00,0x00,0x00 };
9: unsigned char CONFIG_MODE_EXIT[] = { 0x01,0x43,0x00,0x00,0x00,0x00,0x00,0x00,0x00 };
10: unsigned char VIBRATION_ENABLE[] = { 0x01,0x4D,0x00,0x00,0x01,0xFF,0xFF,0xFF,0xFF };
11: unsigned char READ_DATA[] = { 0x01,0x42,0x00,0x00,0x00,0x00,0x00,0x00,0x00 };
12:
13: unsigned char DSC2_rw(
14: unsigned char cmd
15: ) {
16: volatile int i;
17: unsigned char data = 0, clk_cnt = 0;
18:
19: for( i = 0; i < 8; i++ ) {
20: unsigned char d;
21:
22: _port_dsc2_cmd = ( cmd & 0x01 );
23: _port_dsc2_clk = 0;
24: cmd >>= 1;
25: for( d = 0; d < DSC2_LOOP; d++ ) nop();
26: _port_dsc2_clk = 1;
27: d = _port_dsc2_dat;
28: data |= ( d << clk_cnt );
29: clk_cnt++;
30: nop();
31: }
32: return data;
33: }
34: void DSC2_send_command(
35: unsigned char *src,
36: int len,
37: unsigned char *des
38: )
39: {
40: int i;
41:
42: _port_dsc2_clk = 1;
43: _port_dsc2_cmd = ( src[0] & 0x01 );
44: _port_dsc2_sel = 0;
45: for( i = 0; i < len; i++ ) {
46: des[ i ] = DSC2_rw( src[ i ] );
47: }
48: _port_dsc2_sel = 1;
49: _port_dsc2_cmd = 1;
50: _port_dsc2_clk = 1;
51: }
52: void INIT_DSC2( void )
53: {
54: DSC2_send_command( CONFIG_MODE_ENTER, sizeof(CONFIG_MODE_ENTER), ReciveData );
55: DSC2_send_command( QUERY_MODEL_AND_MODE, sizeof(QUERY_MODEL_AND_MODE), ReciveData );
56: DSC2_send_command( SET_MODE_AND_LOCK, sizeof(SET_MODE_AND_LOCK), ReciveData );
57: DSC2_send_command( CONFIG_MODE_EXIT, sizeof(CONFIG_MODE_EXIT), ReciveData );
58: }
|
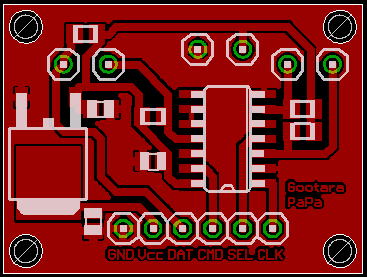
INIT_DSC2() ���������Ƃ��ČĂяo������A�K�v�ɉ����āADSC2_send_command( READ_DATA, sizeof( READ_DATA ), ReciveData ); �Ƃ���AReciveData �Ƀf�[�^���i�[����ċA���Ă��܂��B�@INIT_DSC2() �ŃA�i���O���[�h�ɐ�ւ������Ă����A�A�i���O�X�e�B�b�N�������Ǝg���܂��B�@�������A�R���g���[���� MODE �X�C�b�`�Ő�ւ����\�ł��B�@��������{�^�������邵�A�]����RC�v���|���l�A�A�i���O�R���g���[�����ł���̂ŁA���Ȃ�V�ׂ����ł��B�i���[��������������A�S�\�[�X�������グ�܂��i���A���܂肫�ꂢ�ȃR�[�h�ł͂Ȃ��̂Ŋ��҂��Ȃ��ł��������ˁj�j���v���Ԃ�Ƀ}�g���̃y�[�W�Ɍ��J���邱�Ƃɂ��܂��i�ӊO�Ɗ�]�҂����������̂� 12/10�j�B
�i�Q�O�O�T�N�P�Q���X���j
�uONO�̓d�]�ǐV���v���s������L�̃g�b�v�ɐ���̗\���u�Q�[���R���g���[���̂܂Ƃ߂��s���v�Ƃ����̂��ڂ�܂����B�@���肪�Ƃ��������܂��B�@�C��������܂��ˁB�@����́A�}���˂B�B�B�i�Ƃ͂������A�N���X�}�X���炢�܂łɂł���������ȁH�Ǝv���Ă��肵�Ă܂��j�B
Xilinx �� CPLD �ɂ́AVccio �̓d�ʂɂ��킹�� I/O �̏o�͓d�������߂邱�Ƃ��ł����ł��ˁB�@�t�ɁA���͂� Vcc +0.5V �Ȃ̂ŁA���S�B�@�����ƁAI/O����Vcc �Ɠ����Ǝv������Ŏg���Ă܂����B�@�܂��A���� 3.3V(=Vcc) �łɂ́A5V�g�������g�������ē��͂�5V�ł����v�Ȏd�l�ɂȂ��Ă邵�B�@�܂�A5V�n��3.3V�n�̃f�[�^�]���� CPLD ��ʂ��A�ȒP�ɂł����Ⴄ�A�Ƃ������ƂɂȂ�܂��B�@�ȉ��AXC9572 �̓d�C�����d�l�̊W�������ȂƂ��낾���������Ƃ��Ďc���Ă����܂��i�Q�l�܂Łj�B
| Symbol | Parameter | Value |
| Vin | DC input voltage relative to GND | -0.5V to Vcc+0.5V |
| Vccio | Supply voltage for output driver for 5.0V operation | 4.75V to 5.25V |
| Supply voltage for output driver for 3.3V operation | 3.0V to 3.6V | |
| Vih | High-level input voltage | 0V to Vcc+0.5V |
| Vo | Output voltage | 0V to Vccio |
�ˑR���̃������c�����̂́A�Q�[���R���g���[�����g����悤�ɂȂ����̂ł����A�̐S�̃��C��CPU 7145F �����Ă��܂����|�[�g������̂ŁA������Ǝg���̂��|���Ȃ��Ă��܂��A�R���g���[����p CPU ��p�ӂ��悤�Ǝv�������Ƃ����������ł��B�@����ŁA�\���̃��C�� CPU �� 7047F �� 5.0V �d�l�Ȃ̂ŁA�R���g���[���n��3.3V �d�l�Ƃ̒ʐM�����܂��s�������ɂ���܂���B�@�����ŁA�ڂɗ��܂����̂� CPLD�̋|�[�g���T����Ƃ������Ƃł��B�@RS232C���x���ϊ�IC���P�p�ӂ���悢�̂ł����A��T�C�Y���傫���Ȃ�̂ŁA�g������̂��g�����A�Ƃ������Ƃōl���Ă��܂����B�@�܂��A���������A�T�uCPU���g���̂ł�����A�����͂�����Ɏd�����Ă��������ȁH�ƍl�����̂ł����A�܂��܂������Ɉ�ꂻ���Ȃ̂ŁA�~�߂Ă����܂����B
�Q�R�F�O�O�NjL�j�@�����DSC2�̐���ł����ACPU��3664F�̏ꍇ�͂ǂ�������ǂ��̂ł����H�Ƃ����₢���킹�������̂ŁA�܂Ƃ߃y�[�W�O�Ɉ�x�A�����Ă����܂��B�@���A����`�F�b�N�����Ă܂���̂ŁA�ԈႦ�Ă����炲�߂�Ȃ����i�w�E����Ă���������Ə�����܂��j�B�@�n�[�h�\���́A�̂₳��̏Љ���Ă�������Ƃ��܂��B
1: #define _port_dsc2_cmd IO.PDR5.BIT.B1
2: #define _port_dsc2_clk IO.PDR5.BIT.B3
3: #define _port_dsc2_dat IO.PDR5.BIT.B0
4: #define _port_dsc2_sel IO.PDR5.BIT.B2
5:
6: void INIT_PORT( void )
7: {
8: IO.PMR5.BIT.BIT.0 = 0; // P50 �ėp�|�[�g�Ƃ��Ē�`
9: IO.PMR5.BIT.BIT.1 = 0; // P51 �ėp�|�[�g�Ƃ��Ē�`
10: IO.PMR5.BIT.BIT.2 = 0; // P52 �ėp�|�[�g�Ƃ��Ē�`
11: IO.PMR5.BIT.BIT.3 = 0; // P53 �ėp�|�[�g�Ƃ��Ē�`
12:
13: IO.PCR5.BIT.BIT.0 = 0; // P50 (DAT) ����̓|�[�g�Ƃ��Ďg�p
14: IO.PCR5.BIT.BIT.1 = 1; // P51 (CMD) ���o�̓|�[�g�Ƃ��Ďg�p
15: IO.PCR5.BIT.BIT.2 = 1; // P52 (SEL) ���o�̓|�[�g�Ƃ��Ďg�p
16: IO.PCR5.BIT.BIT.3 = 1; // P53 (CLK) ���o�̓|�[�g�Ƃ��Ďg�p
17: }
|
�����t�������Ē����āA�v���O�����ŏ��̏������̎��ɁAINIT_PORT() �������Ăяo���Ă��炦��悢�Ǝv���܂��B
�i�Q�O�O�T�N�P�Q���P�P���j
�@���� ROBO-ONE ����(3/18-19) �ƁA�K�肪���J����Ă܂��ˁB�@���킵���́AROBO-ONE �����y�[�W�ŁB�@�|�C���g�́A
�i�Q�O�O�T�N�P�Q���P�Q���j
�@���C�� acrobar reader ���J���� pdf �� document ��F�X�Ɠǂ�ł���ƁA74LCX�V���[�Y�ɖڂ����܂�܂����B�@��� 12/11 �ɏ����� CPLD �Ɠ����� 5V �g�������g������A�Ƃ̋L�ڂ�����ł͂Ȃ��ł����B�@����́A�m��Ȃ������i�C�Â��Ȃ������j�Ƃ͂����A���������Ȃ����ƁB�@����Ƃɗ~���� 74LCX125 �������̂ŋ߂��̃T�g�[�d�C�ɔ����ɍs���Ƃ��āA���̐���{�[�h(main CPU : SH2/7047F)���璼�ڎ�M�@��ڑ����邱�Ƃɂ��܂��B
�i�Q�O�O�T�N�P�Q���Q�S���j
 |
 �@�E�@�]���Ă��� 3.3V���M�����[�^���ڂ��Ă݂܂����B |
�@EAGLE ���o�[�W�����A�b�v����Ă����̂ŁAv4.16 �ɂ��܂����i����ƌ����ĕs���������킯�ł͂Ȃ��̂ł����j�B�@�ŁA�C��������ADSC2 �̕ϊ��{�[�h������Ă��܂��Ă܂����B�@���ꂩ��A�ĕt�����܂��B�@DSC2 �̎�M�{�[�h�ɒ��ڂ�������`�ɂ��܂����B�@���łɗ]���Ă��� 3.3V ���M�����[�^�i500mA�Ή����ƃf�J�C�ł��ˁj�����āE�E�E�B
 |
 |
�@����猙�ȗ\���B�B�B�@�v�������Ă��̂܂܂ɂ��Ă����}�ʁi���T�[�{�p�ƃZ���T�{�[�h�j�܂ňꏏ�ɏĂ����Ƃɂ��܂����B�@���łɗʎY�̐��ɁB�B�B
�i�Q�O�O�T�N�P�Q���Q�T���j
�@�F����ɏK���āH Alibre Design Xpress (Plus) ���C���X�g�[�������̂͗ǂ��̂ł����A������Ăǂ̂悤�Ɏg���낤�H�Ŏ~�܂��Ă��܂��܂����B�@3D �C���[�W������āA�O���O���������Ă݂����I�@*.DXF �t�@�C���ł͓W�J�}�����o�Ă��Ȃ����B�B�B
�@�Ƃ������ƂŁAAlibre Design Xpress �͂����Ă����āA����̑����� DSC2 �Ȃǂ̊������Ă܂����B�@����ʼn���ڂ̊���Ȃ̂������Ă܂��A����Ă��܂����B�@�K�x�Ȋ��o�Ƃ����̂�����Ɗy�ɍ��܂��ˁB�@�ȉ��A���̊��o�����t�ŁB�B�B�@���у��C�g�ŘI���i���� 5cm�j�łP�O���A�����͂�����ƒ��߁i�����̊��o����ԗ{���Ă��������j�A�G�b�`���O�͈�ԏ����� clearance �̂Ƃ��낪���n�j�B�@�������A�G�b�`���O��������̂ŁA�l���Ŕ��f����ƒ������ꂷ����ꍇ������B�@�G�b�`���O�́A�Ƃɂ������x���d�v�B�@�t���w�^��Ƃ������A�������Ă�Ԃɉ��x���������Ă��ă��[�g��������B�@�Q�C�R���A���ŃG�b�`���O������ꍇ�́A�P�����ƂɁA���x�����邱�Ƃ��]�܂����B�@�G�b�`���O�����͂U�O���̉����ɃG�b�`���O�t�̓������P�[�X�����Ă����v�i������߂邵�A�G�b�`���O�t�ɔM���ړ�����ƌ��ʂƂ��ĉ��x��������j�B
�i�Q�O�O�T�N�P�Q���Q�U���j
�@�S���ԁA���������X�L�[���փX�L�[�ɍs���Ă��܂����B�@�A������������B�B�B
 |
�i�Q�O�O�T�N�P�Q���Q�V�|�R�O���j
�@�������Ă�����̂P���d�グ�Ă݂܂����B�@5V I/O �̃}�C�R������ 3.3V �� DSC2 �̎�M������Ƃ������̂ł��B�@�\�t�g�E�F�A�͑O�����J���B�@�n�[�h�́A74LCX125 �� 10k���̃v���A�b�v��R�B�@DAT �M���̓v���A�b�v�݂̂Œ��ڐڑ����Ă��܂��B
 |
��M�@�̊�ƒ������邱�Ƃŏ������܂Ƃ߂܂����B�@�}�ʂȂǂ́A12/25�̋L�ڂ��Q�l���������B
�@���N�P�N�����ǁA�ǂ��̑��ɂ��o��ł��܂���ł������AROBO-ONE ���܂ł͑����^�ׂ��̂ŁA���N�����͗\�I�i�^�悯��Ζ{��j���o�Ă݂����Ȃ��B�@����ł́A�ǂ����N���B�B�B
�i�Q�O�O�T�N�P�Q���R�P���j
�މ�V�N
�@�@���N���A��낵�����肢���܂��B
CPU���Ă܂ʼn��Ƃ��g����悤�ɂȂ���DSC2�̂܂Ƃ߂����Ă݂܂����B�@�R�R�ł��B�@�قƂ�ǁA���̃y�[�W����̈��p�ł����A�⑫�����ȂǓ���Ă����܂����B
�i�Q�O�O�U�N�P���Q���j
�@ROBO-ONE �T�C�g�ɉ��̋L�ڂ��Ȃ��B�B�B
�@����� ROBO-ONE �G���g���[�����Ȃ̂ɁA�����̏��ނȂǂ̊J�����Ȃ��̂ŁA���[���Ŗ₢���킹�B
�@�����͋A����������̂ŁAROBO-ONE �T�C�g��`���ƁB�B�BROBO-ONE�̃G���g���[���@���ς��܂����A�̍��m�B
�@���ސR�����Ȃ��Ȃ�A�S�� Web �ōs�������ɂȂ�܂����B�@���ߐ蒼�O�̃G���g���[������ő��W�҂̕����y�ɂȂ�ł��傤�ˁB
�@�ƂĂ��ȒP�ł����̂ŁA�Ƃ肠�����A�G���g���[�������Ă����܂����B
�i�Q�O�O�U�N�P���P�U���j
�@���傱�����R�R���X�V�B�@DAT�M���ɂ�LCX125������ꍇ�̗�ł��B
�i�Q�O�O�U�N�P���Q�O���j
�@�V�N��A�ƂĂ��y���������ł��B�@��Ò����� �������킳��A�Q�����ꂽ�F����A���肪�Ƃ��������܂����B
�@�ŋ߁A�X�V���Ȃ����̃T�C�g�̂��Ƃ��F����A�悭�����m�ŁA�����܂����B�@���̖��O�͌��\�L�܂��Ă�̂ł��ˁi�j�B
�@����́A���Ɉ���������̂������Q�ł������A����̃C�x���g�ɂ́A�����Ɓu�����v���{�b�g�����Q�������Ǝv���܂��B�@�������킳��Adenno_ono����AJinSATO����A�ꏏ�Ɂu�������{�b�g���v�������܂��傤�B
�@����`�Ƃ���A���c�����Ă��������܂��āA���肪�Ƃ��������܂����B�@�ƂĂ��Q�l�ɂȂ�܂����B�@���ۂɁA�����̃��{�b�g�ȊO�����ƌ����̂͗ǂ��̌��ɂȂ�܂��ˁB�@�����ȓ����܂ŁA���ɓ��ꂳ���Ă��������܂����B�@�e�q�ŗV�ׂ鑀��n�A�Q�l�ɂȂ�܂����B�@�˂�����������A���b���ł��܂���ł������A��������A�l�W�͒����܂����i�ȂA�ǂ�ځ[�݂����j�B�@�~���������l�W����ɓ����Ă��ꂵ�������ł��B�@���肪�Ƃ��������܂����B�@denno_ono����A�ӊO�ƉƂ��߂��̂ɂ͋����܂����ˁB�@���x�́A�ߏ�ŏ����������Ă��������B�@�������킳��A�F�X�Ƃ��C�����A���肪�Ƃ��������܂����B�@�����l�Ŋy�����Q���ł��܂����B�@�܂��䂫����A�y�[�p�[�X�[�c�̂����������܂����B�@���x�́A��̕����B�B�B�@���̖�]�b���ɎQ�����������X�A���ɁAJinSATO����A���삳��A�֓�����A����Ƃ���낵�����肢�v���܂��B�@�F������ɋ����������ꂽ�݂����ŁA��{�R���Z�v�g�͗ǂ��A�s����ȁI�Ƃ�����ۂ����������Ƃ��ł��܂����B�@���{�b�g�r�����[�h�i�ł��������H�j�ŗD��������KO��40kgcm�T�[�{�U���炦���Ƃ́E�E�E�B�B�B�i�����~�����B�B�B�j�@�Ō�ł����A�����ƌ������ƂŁA�����O���킩�炸�̂܂ܘb���������Ă��������܂������A������̓��������̂���l�������Ȃ��A�Ɗ����܂����B
�@�F����p���[���܂����̂ŁA�������C���������āE�E�E�Ƃ����Ƃ���Ȃ̂ł����A������ATOEIC�̎���������̂ŁA�����͉p��̕��ɂ��܂��B
�@�i�C���]���ɔ��c�t�����邭�炢�ł��傤���B�B�B�C���]���ɉp��̕���������܂��B�B�B�j
�i�Q�O�O�U�N�P���Q�Q���j
�@�o�b�e���[�Ď��̂��߂̉�H�ύX��ADC�l�̒��������Ȃ����܂����B�@�o�b�e���[�d���� 10k��, 330���̒�R������ ADC (Vref=3.3V) �ɓ��́B�@�v�Z�l�Ƃ̓Y���Ă��邪�A���j�A���e�B������AADC�l�� 1/10 ����Γd���ɂȂ�̂ŁA�����͂��Ȃ��ŗl�q�����邱�Ƃɂ��܂����B
 |
�i�Q�O�O�U�N�P���Q�W���j
�@�v�����݂͕|�����́B�@�ȑO�͓����Ă����v���O�������ڐA���Ďg���Ă����̂ł����A���̂����삪�ρB
�@�䗬�ŕ����������Ȃ̂ŁA�����炱����Ŏ��g���Ȃ��B�B�B�@�ȉ������̗�Ƃ��ċ����Ă����A����̑����@�������c���Ă����܂��B
1: void sub( void )
2: {
3: static int c = 0;
4:
5: switch( c ) {
6: case 0: // ��������������
7: c++;
8: break;
9: case 1: // ��������������
10: c++;
11: break;
12: default: // ��������������
13: c = 0;
14: break;
15: }
16: }
|
�|�C���g�͕ϐ� c �̒l�ł��B�@sub() ���Ăяo���x�ɃC���N�������g���Ă����A���̗�ł�
c=2 �̎��� c=0 �ɂȂ�A�J��Ԃ������B
�������A3�s�ڂŕϐ���`�Ə����l�ݒ�����Ă���̂ł����A�����l 0 ������������Ȃ��Ƃ������Ƃł��B�@�K��
default �̂Ƃ��납��X�^�[�g���Ă鋓���������Ă����̂ŁA�������Ă��܂����B�@��Ƃ��ẮA�ȉ��̒ʂ�ł��B
�@�@�E�@3�s�ڂ����̊O�ɏo���āA�Ăяo���O�ɕϐ� c �܂ߏ������̕K�v�ȕϐ��ɑ��Ēl�����Ȃ����B
�ꌩ�A����ʼn����Ǝv����̂ł����A�T�[�{�̊p�x�����l�Ȃǂ��e�[�u���Ƃ��Ď�������A�Ƃ����̂��ł��Ȃ��ƌ����Ă��Ȃ����H�ƁA�Ƃ��Ă��s���Ɋׂ��Ă܂��B
�������Ƃ���ł킩���Ă����̂́A0 �ŏ��������������܂������Ă��Ȃ��悤�ȋ����������Ă܂��B�@gcc
�̎d�l�H
�@���ƁA�i���X�j�C�������̂ł����A�g�ݍ��݂ŁA���ARAM�ɑ��ăo�b�N�A�b�v�d�r�Ȃǂ����Ă���Ƃ������Ƃ́A�����������ϐ��̒l���O��̏I���l���c���Ă���\�������邽�߁A�Œ���̃}�i�[�Ƃ��ď�L�̂悤�ɏ������͎����ŏ����������悢�Ƃ������Ƃł��B�@�T�[�{�̏����l�Ƃ��A�O�p���̃e�[�u���Ƃ����������Ȃ��e�[�u���ɂ��ẮAconst
�����Ē�`�����܂ōs���Ă����̂ł����A���������ϐ��ɑ��ẮA�P�A������Ȃ������ƁA���ȁB
�@�ƁA�킩���Ă����Ƃ���ŁA����ς�[���������Ȃ��ł��B�@�v���O��������蒼���āACPU�{�[�h�֓ǂݍ��܂�������ł��A��̃\�[�X�̒ʂ菑���Ă���ꍇ�Ac
�� 0 �ɂȂ�܂���B�B�B�@�N�������Ă���������Ə�����܂��B
�i�Q�O�O�U�N�P���Q�X���j
�h�Y�^�j�@KO �� RedVersion �͒�i�ȉ��̓d�����T�[�{�ɗ^����ꂽ��Ԃ̏ꍇ�A�|�W�V�����L���v�`�������������삵�Ȃ��ꍇ������B�@���ɕ����T�[�{���Ȃ��ă|�W�V�����L���v�`���ɂ�郂�[�V�����쐬�����Ă���ꍇ�́A�v���ӂł��B
256 ( JiGoRo ) �̃v���t�B�[���i�ʐ^�W�j������Ă݂܂����B�@�������{�b�g���ɏW���ł��Ȃ����X�B�@�܂��܂� ROBO-ONE �������Ɏv���Ă��܂����B
 |
 |
 |
 |
 |
 |
�@256 ( JiGoRo ) 5th Feb., 2006 �v���t�B�[���ʐ^�W
�i���傱���傱�����Ă����̂ŁA���ꂢ�ɏo�������Ȃ��A�Ǝv���Ă܂��B�@���A�ŋ߂̊F����̃��{�b�g�͊O�������������Y��ɂł��Ă܂��˂��B �@�ȒP�ɏo�������ȂƂ���ŁAMARU�����炪�Љ��Ă���o�L���[���t�H�[���Ƃ����̂�����܂��ˁB�@�]�T���ł����璧�킵�Ă݂����Ǝv���܂��j |
||
�i�]�k�j
�Q�����{����E����ڂ�i�P�N����P�D�T�N�قǂ̒����O�o�i�o���j�j�̂ŁA������C�ɂȂ�Ƃ���B�@�Ȃ�Ƃ����Ă��A���p������ρB
���T�̐��ʂƂ����A���N�x��Јē��p���t���b�g�Ɂi�ʐ^�ƃv���W�F�N�g�̗��b�Ȃǂ����y�[�W�ɓn���āj�ڂ������ƂƁATOEIC
�̓_���� 170�_���オ�������Ƃ��炢���Ȃ��B�B�B�i���N���p�ꌤ�C��y�j���Ă����̂ŁA����Ȃ�̐��ʂ��o�Ăق��Ƃ��Ă܂��j�B
�i�Q�O�O�U�N�Q���T���j
�@��T�͂��낢��Ƃ������P�T�Ԃł����B�@�Ƃ����w�ɗ�̂��́i�V�N���I�̎����j�������ĖK�₵����A�V�����E��̐l�����ƃf�B�X�J�b�V����������A���N�ԎĂ����p�ꌤ�C���T���ŏI�������B�B�B�@�n�܂���̂�����A�I�����̂�����܂����B
�@�����́A�g�ѓd�b��V�����Ă݂܂����B�@������ au �Ȃ̂ō���� au �� W41CA
�ɂ��Ă݂܂����B�@��ʂ��傫���Ƃ������ƂőI�т܂����B�@�ŋ߂̂� 2.6M���ʐM���x���o���ł��ˁB�@�������A�Ƃ̒��͍��܂œd�g���͂��Â炩�����̂ł����A��������邵�B�@�p�\�R���ƌq�����肵�Ă�����A�����Ƃ����Ԃɖ�ɂȂ��Ă��܂��܂����B�@web
�����ꂿ�Ⴄ��ł��ˁB�@���ꂩ��͒ʋA��ɓd�Ԃ� web �݂ċA��A�Ƃ������ƂɂȂ肻���ł��B
�@�Ƃ������ƂŁA���낻��C���������� ROBO-ONE �������[�V�����쐬�ɓ��낤���Ǝv���܂��i�ƁA��T�����v���Ă����悤�ȁB�B�B�j�B
�i�Q�O�O�U�N�Q���P�Q���j
�@����� ROBO-ONE �͑ʖڂ�������Ȃ��B�B�B�@�ƁA�v���Ă��Ă��A���Ԃ��o�����B�@�Ƃ������ƂŁA�y�������{�b�g�ŗV��ł݂܂����B
�@�����́A����Õ��s��S�����ă`���[�j���O�B�@������O�ł����A������������Ԃ̈��肵���Ƃ����T���Ă���̂��ƂɂȂ�܂��B
�@��������̂Ƃ���A�Ƃ����̂́A�u���u���������Ȃ��Ƃ���A�Ƃ����������ł��܂����A���Ɋ��o�I�ȂƂ���B�@���͂����d���v���݂āA����d�����������Ȃ�Ƃ����T���Ă܂��B
�@��������ʒu�����܂����Ƃ���ŁA�Õ��s�B�@�W���C���n�m���ƁA�v�Z�ɂ����s�̎��ɁA�d�S���E�A���ɐU���̂�ł��������Ƃ��ē��삵�Ă��܂����߁A���肵�ĕ����Ȃ��B�@�s���n��������悤�Ƃ���ƁA�W���C�������Ȃ��Ƃ����Ȃ����A�ǂ��������̂��B�B�B�i�ȑO�A�����s���s�����Ƃ����A�W���C���n�e�e�̕������肵�Ă���j�@���̂�����A�q���g���~�����Ȃ��B�B�B
�@���ꂩ��A�����]���A�T�C�h�X�e�b�v���v�Z�ʼn������悤�ƁA�v�Z�����l���Ă݂܂��i���A����Ȃ��Ƃ����Ă��ĊԂɍ����낤���H�j�B�@���̂�������A�q���g���~�����Ȃ��B�B�B
�i�Q�O�O�U�N�Q���Q�U���j
�@����܂�X�V���Ă��Ȃ��̂����C�Ȃ��̂ŁA������W���B�@�Õ��s�Ɠ����s�i�W���C������E�Ȃ��j�ł��B�@��{�ɒ����H�Ƀr�V�r�V�v�Z�����ĕ������Ă܂��B
�@�S�āA��HV�d�l�T�[�{�B�@�������ǂ����Ȃ��ł����B�@�P�ł��X�e�b�v�����ɐi�܂Ȃ���A�������T���悤�ƌ��߂��B
�@�W���C����ON/OFF�ł̓��[�V�������萫���ς��܂���B�@�����Ƃ��A�O�I�ȍ�p���Ȃ��ꍇ�A�W���C���͗v��Ȃ��u�͂��v�B
�@�������E�E�E���������Ȃ̂ł����A�����s���ł��܂���B�B�B�i�܁j
�@�ǂȂ��������悤�Ȏ����g���Ă�����ŁA���[�V�����f�[�^�i�p�x�����ԃf�[�^�j�𑗂��Ă��������܂���ł��傤���H
 <�Õ��s�E�摜���N���b�N����Ɠ���ɂȂ�܂�(12M)> |
 <�����s�E�摜���N���b�N����Ɠ���ɂȂ�܂�(2.4M)> |
 <�����s�E�摜���N���b�N����Ɠ���ɂȂ�܂�(2.4M> |
�i�Q�O�O�U�N�R���P�R���j
�@�������[�I�@���������ł��܂����I�I�@�W���C����ON�ɂ��Ă����̂ł����A�ǂ����Q�C�������������݂����ł��܂��������ł��Ȃ������݂����ł��B�@�i�Q�R�F�S�T�j
�@���ꂵ���Ȃ��āA�����摜�B�e�i�Ƃ肠������������̂݁j�@�i�O�F�S�O�j
 <�����s�E�摜���N���b�N����Ɠ���ɂȂ�܂�(3.0M> |
�i�Q�O�O�U�N�R���P�S���j
�@�������������[�I�@�N���オ��ł����[���I�I���Ƃ́A�����̐�����A�Q���ׂ�Ƃ������ƂƁA�A�����ĉ��Z���ł���E�E�E�B�@�܂Ă�B�@�o�b�e���[����A���A�e�k�`�r�g�|�q�n�l�������݂ł̓�����āA�܂�����ĂȂ����B�@���f�͋֕��B�@�������A�\�I�p�̎��R���Z���[�V�����������B�B�B�i�������Ȃ��ł��ˁj
 <�N���E�摜���N���b�N����Ɠ���ɂȂ�܂�(3.0M> |
�@�Ђ����Ԃ�ɁA�������Ƃv���������ĉ���Ă܂����B
�@�g������̂Ƃ����ŁA�������Ȃǂ́u���s�v�̊�{��������Ă���ł͂Ȃ��ł����I�@����́A����c���Ă��܂����������̌v�Z���s���̓����B�@���`��A�Y�܂����B�B�B�@�܂��́A�����Əo�ꂷ�邱�Ƃ��P�ɂ���ׂ����B�B�BJinSato�����������Ɖ������A���S���Y������ꍞ�A�Ƃ��邵�B�B�B�@�Y�܂����B�B�B�@�܂��́AJinSato����́u�o�b�e���[�d���������Ă������オ���悤�ɂ���v�̃R�����g�������ł�����Ă݂��B�@�m���ɁA�����̊�Ȃ����ȂƂ��낪�悭�킩��B�@�`���[�j���O�����B�@�R�c���킩���Ă�������������B
�i�Q�O�O�U�N�R���P�V���G�q�n�a�n�|�n�m�d���O���j