 |
 |
256(JiGoRo)-Series ���L (2) �@
SEMB1200A �̃y�[�W��K�X�X�V���ł��B
�@�v��������A�X�V���~�߂Ă��܂����B�@�n��ɂ������Ă����킯�ł͂Ȃ��̂ł����A�����������قǁA�F�X�Ɩڂ܂��邵�����ς���Ă��܂��đ�ςȖ����ł����B�@�F�X�ȕ��X�Ƃ������@��Ɍb�܂�A���{�b�g��ʂ��Ď��삪�L���������������܂��B�@�����s�v�Z�ɂ�郍�{�b�g�����Ƃ������Ƃ��ł������A�������킳��̗��K��Ƃ��A�d���W�̕��X�Ƃ������ւɂȂ�܂����A���{�b�g������I�ڂł������A���x�����A������ ROBO-ONE �̃����O�ɗ����������A�����v���܂��B�@�ȉ��A���̂Ƃ���A���R���ƔY��ōl�����܂Ƃ߂Ƃ��ď����L���Ă����܂��B
---------------------------------------------
�@�������邩�A����\������̂��A�\���͖��m�������ǁA��肽�����Ƃ͂�������A�Ƃ����z�������͋����B�@������A���Ƃ́A��邾���i�̂͂��j�B
�@�� JiGoRo �̐���n�A���J�ɂ��āA��������������āA����n���������i���������B�B�B�j
| ����n | �@ | �@ | �@ | �ڑ� |
| ���C��CPU | SEMB1200A | 1 | �����s�v�Z�ȂǒS�� | �@ |
| �A�i���O�n | �]���L�b�g | 1 | �W���C���A�����x�Z���T���� | CSI |
| �f�[�^���K�[ | SD card | 1 | 1Gbyte | CSI |
| �Z���T | CDS | 1 | ���x���� | ADC |
| �@ | AGB65-4FS | 2 | �Z���T�̂ݎg�p���ȁH | UART/CSI |
| �R���g���[�� | LPGC-60000 | 1 | �v���X�e�Q�p�R���g���[�� | CSI |
| ���̑� | ZIG-100B | 1 | �����e�i���X�p ZigBEE | UART |
| �o�b�e�� | LiPo 2�Z�� | 2 | 2,200mAh �� 370mAh �̂Q�� | �@ |
| �@ | �@ | �@ | �@ | �@ |
| ���J | �@ | �@ | �@ | �@ |
| �T�[�{ | KRS-2346ICS-RV | 20 | �q�U�̓X�s�[�h�A�b�v���ǔ� | PWM |
| �t���[�� | A5052 | �@ | 1.2mm���i�����̂��̂����̂܂܁j | �@ |
�@�����āA�\�z�i�K�̎��� JiGoRo �̐������B�B�B
| ����n | �@ | �@ | �@ | �ڑ� |
| ���C���b�o�t | SEMB1200A | 1 | �����s�v�Z�ȂǒS�� | �@ |
| �A�i���O�n | ���쒆 | 2 | �Z���T�v�� | CSI |
| �f�[�^���K�[ | SD card | 1 | 1Gbyte | CSI |
| �Z���T | MDP-A3U9S-U | 1 | 3���W���C��,3�������x, �n���C�Z���T,���x�Z���T | CSI |
| �@ | CDS | 1 | ���x���� | ADC |
| �@ | GP2D12 | 2 | �������� | ADC |
| �@ | �e�ʃZ���T | 2 | ���F�� | ADC |
| �@ | AGB65-4FS | 2 | �������͑���i�Z���T+����ADC(+SPI)���ȁH�j | UART/CSI |
| �R���g���[�� | LPGC-60000 | 1 | �v���X�e�Q�p�R���g���[�� | CSI |
| ���̑� | ZIG-100B | 1 | �����e�i���X�p ZigBEE | UART |
| �o�b�e�� | TP2100C-3S | 1 | LiPO 11.1V 2100mAh | �@ |
| �@ | �@ | �@ | �@ | �@ |
| ���J | �@ | �@ | �@ | �@ |
| �T�[�{ | KRS-4014HV | 23 | �q�U�̓_�u���T�[�{�� | UART |
| �t���[�� | A5052 | �@ | 1.5mm, 2mm�����g�p�i�V�K�쐬�j | �@ |
�@����n�́A3.3V, 5.0V �����݂��Ă��܂��̂�����A�ɗ͂R�D�R�u�œ�����B�@�������A�S���ꂩ�玩���ō�肫��Ȃ��̈������B�@Make or Buy �̑I���� Time is money. �ƓV���ɁB
�@�v���X�e�R���g���[�����͂��߁A�e��f�o�C�X�� CSI(SPI) �ł��邱�Ƃ���A�ϋɓI�Ɏg�����Ƃɂ���B�@����܂Œm��Ȃ������Ƃ͂����A�����ňꐶ�����|�[�g���������đΉ����Ă����̂����������B�@����K�i����邱�Ƃ̏d�v�����ĔF���B
�@���ƁA���ڂ͌��߂Ă��邪�A�ǂ��I�Ԃ��H�ŔY��ł���̂��A�J�����i�b�b�c�C�b�l�n�r�Z���T�j�B�@�ŋ߂̋C�ɂȂ�Ƃ���ŁA�R�R�i�b�`�a��芔����Ёj�B�@���ɁA�m�b�l�O�R - �e�́A����p�P�O�O�x�ŁAQVGA, QQVGA���[�h���T�|�[�g���Ă���̂ŁA��f���� VGA 640*480 �� 1/4 or 1/16 �ɂ����� 320 * 240 or 160*120 �Ŏ�荞�߂�̂ŁA��f��������Ȃ��Ǝv���A�`���[�j���O�i�K�ŕς�����̂͂��ꂵ������B�@30fps(@VGA) �Ƃ����̂��ǂ̒��x�̂��̂Ȃ̂��́A���m���iQQVGA���Ɨ��_��480fps���Ă��ƁH�j�i���Ȃ��Ƃ��A���̃V���A���ʐM���͗ǂ��j�B�@�i�ƁA�����܂ŏ����Ă����A�N�������킵�Ă���Ȃ����Ȃ��B�B�B�ꏏ�ɂ�낤�Ƃ�������n�ɋ�������W�ł��j
�i�Q�O�O�U�N�W���^���j
����͕ς��A����A�ς���B�@�����́B
|
|
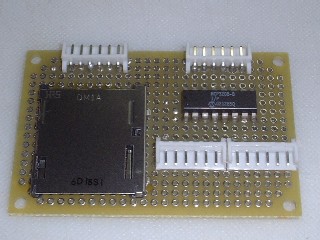
�Ƃ��Ă��R���p�N�g�ȓ��]�ƃT�u�{�[�h�B�@�V�O���W�O���Q�T�̒��ɋÏk�B�@CSI �g���[�q���S�ڂ��Ă��A�܂��y�n����B�@�Ɨ� PWM 32ch, UART 10ch �p���[�ł������B
�ł��A�Y�ꂿ�Ⴂ���Ȃ����Ƃ����́A�c���Ă����܂��B�@�O����f�O�̔�b�H
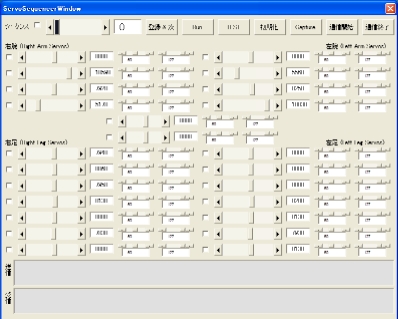
���[�V�����쐬���A�}�ɃT�[�{�������Ȃ��Ȃ����B�@�b�o�t�̂q�n�l�ɏ������^�C�~���O�������̂ŁA�v���O��������^���Ă��܂����B�@�d�������f�����Ă��邱�ƂɋC�Â����A���ɂȂ��āE�E�E�B
 |
�����Ȃ��ꍇ�́A�܂��A�d�����`�F�b�N����B
�i�Q�O�O�U�N�W���Q�O���j
MMC(SD-card) �̃R���g���[���ɂ��āB�@ChaN �������R�R���Q�l�ɂȂ�܂����i�Ƃ������A�S�ĕ₦�܂��B�@���炵���ł��j�B
SPI �ɂ�鐧��ƁAFAT16(32) �ł̑��색�C�u�����܂ő����Ă܂��B
�Ƃ������ƂŁA�ȒP�ɍ���Ă݂܂����̐}�B
 |
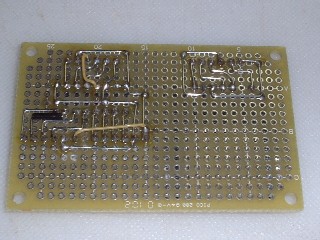 |
CSI(SPI) �[�q���� SD-card, 12bit ADC 8ch �ł��B�@�ǂ�ǂ�g�����Ă������B
���ƁAZigBEE ���[�U�[�̏�e���ŋ������Ă܂����A�`�����l�����͂���Ƃ��āA�ʐM�G���[���C�ɂȂ�Ƃ����R�����g������܂��ˁB
���̏ꍇ�A���{�b�g���쒆�ɂo�b�Ɩ����ʼn�����������킯�ł͂Ȃ��̂ł����A�������Ȃ�ʐM���x�𗎂Ƃ��܂��B
�o�r�R���g���[���ɂ��Ă�����قǑ��x�͏グ�Ă܂���B�@���ǖ����ł�낤�Ƃ����ꍇ�A�������������̂��H�������K�v������Ƃ������Ƃ��Ǝv���܂��B
�i�Q�O�O�U�N�W���Q�V���j
�@�܂��A�P�����~�߂Ă��܂��܂����B�B�B�@�~�߂����ʂ́A���̂Q�I
�@�P�ڂ́A�܂��Ȃ�������SEMB1200A�̃��C�u���������B�@�����P�́AJiGoRoHP �̑g�ݏグ�B
 |
 |
 |
(*2) : �ߓ��Ȋw�i���j�� |
�i�Q�O�O�U�N�P�O���P���j
�v�X�X�V�ł����� denno_ono ����̂Ƃ�����ROBO-ONE �����y�[�W�ɑ����Ă̍D�]�����������܂����B�@�L��������܂��B�i���x�����AONO-ONE �Q�b�g���邼�j
�C����ǂ����āASEMB1200A �y�[�W������ɍX�V���܂����B�@����́A�v���X�e�R���g���[���̐ڑ��ɂ��Ăł��B
�i�Q�O�O�U�N�P�O���Q���j
���܂����I ONO-ONE �Q�b�g���܂����idenno_ono ����̂Ƃ����j�B�@denno_ono ����̂Ƃ���ɏЉ��n�߂Ă���A�v�����̒��q���߂��Ă����݂����i����ǁA�g�b�v�y�[�W���Q�Ƃ���ہAindex.html �܂ŏ����ƁA�Â� index.html ���ǂݏo������ł���ˁB�B�B��j�B�@�g�b�v�y�[�W������Ƃ��� SEMB1200A �y�[�W�������Ȃ����́AURL �� index.html �������Ă݂Ă��������ˁB
�܂��܂��C����ǂ����āi�ڂ̉��ɃN�}������āj�ASEMB1200A �̃��C�u�������X�ɍ��܂����B�@����́APWM
���o�́B�@���C�u�����������Ă���̂ŁA���ꂾ���ł��B�@�ݒ�P�s�A��荞�݂P�s�B
�����̓R�R�܂ŁB�@�Ǝv������A�ߓ��Ȋw�i���j�̃T�C�g�� ICS2 �̃R�}���h���J����܂����ˁB�@�Ƃ������ƂŁA���C�u�����̎g�����܂߂��T���v���R�[�h�� SEMB1200A �y�[�W�ɋ����Ă����܂��̂ŁA���Q�l�܂ŁB�@���������ȒP�B
�i�Q�O�O�U�N�P�O���R���j
SEMB1200A ����������܂����ˁB�@�R�R�����[�J�T�C�g�ɐF�X�Ƃ�����Ă܂��B�@���[�����O���X�g������݂����ł��B�@�����o�^���܂����B
����ɂ��ƁA�����́A�c�N������Ƃq�s����B
���ƁACygwin �܂߂��J�������\�z���Ă����T�C�g�������܂����B�@���\�A�ڂ��������Ă���̂ŁA���̃y�[�W���p������������Ȃ�������B�B�B
�i�Q�O�O�U�N�P�O���V���j
ROBO-ONE ��11����K�������J����܂����B�@�r�������B�B�B�@�����Ȃ��Ƃ����Ȃ����ƂɋC�����܂����B
�i�Q�O�O�U�N�P�P���Q���j
�Z�������X���Ђƒi���B�@���͐V�^�W�S���[�� TRONSHOW2007 �ɎQ�l�o�W�Ƃ����`�ŋ��͂����Ă��������Ă��܂����B
���ɗ��Ă������������A���R�����Č��w���Ē��������A�L��������܂����B
SEMB1200A �� T-Kernel �����Ƃ������Ƃ̉��p�ƌ������ƂŁANEC �O���[�v�u�[�X�ɓW�����Ă���܂����B
 |
 |
 |
����ʐ^
|
TRONSHOW2007 �̓W�����|�[�g�́ANEC�G���N�g���j�N�X�̃z�[���y�[�W�i�R�R�j�ɂ��f�ڒ��B
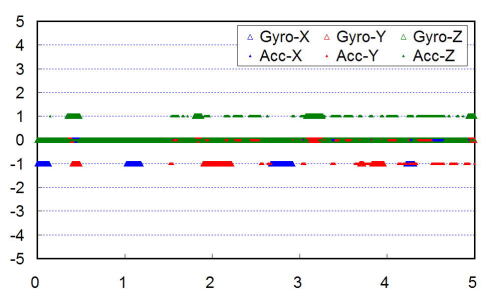
�����ŁA�V���Ԃ��R���̘A��������s���܂����B�@�W�����Ȃ�������������Ă��������܂����B�@�ߓ������\��̃A�i���O�{�[�h�ƂR�c���[�V�����Z���T�[�̒��q���f�[�^���O�Ƃ��� FLASH-ROM �ɗ��Ƃ��Ă݂܂����B�@���ʁA�N������A�F���G�������̕ϓ��A���ɂ����āA�W���C��(MEMS�j�̃I�t�Z�b�g��͐������s���Ă���悤�ł����B�@�ȉ��A�Q�l�܂łɁA�W���C���Ɖ����x�̃f�[�^���ڂ��Ă����܂��B
 |
 |
|
|
�i�Q�O�O�V�N�P�Q���P�O���j
�W���C���Z���T�ɂ��Ă��傱���ƍl�@���B�i�����Ƃ�肽���������ǎ��Ԃ����Ȃ��ďo���Ȃ������B�B�B�j
MEMS�Ƃ����f�o�C�X�̓�����A���x�ɑ��Ă̕���K�v�ɂȂ�܂��B�@����ɂȂ��Ă���^�C�~���O�ŃI�t�Z�b�g������Ă��ǂ��̂ł����A���{�b�g�̂悤�ɏ펞�����Ă���ꍇ�ɂ́A�I�t�Z�b�g����邾���̐M�ߐ��̂���Î~�������Ȃ��ꍇ������܂��B�@�����ŁA�P���ł͂���̂ł����A���x�Z���T�[���W���C���t�߂ɐݒu���A�Î~�ۊǁA�O�C���x�ω��̒��������Ă݂܂����B
 |
 |
�Ȃ��Ȃ��̐��x�Ńt�B�b�e�B���O�ł��Ă��܂����B�@�R���̂����P�����܂�O���ɉe������Ă��Ȃ����������Ă���̂ŁA�t�B�b�e�B���O���x�������Č����܂����A�����ɏ���Ă���̂ŁA�n�j�ł��傤�B
�Q�l�܂łɁA����̎���������H�����i�����Љ�܂��i��H�Ƃ����قǂł͂���܂��B�B�B�j�B
���x�Z���T�[�̓i�V���i���Z�~�R���_�N�^�[����LM35(�H���d�q�ʏ��ōw���ł��܂��j��4V�ȏ�̓���ۏŁA�o�͂� 0 [mV] + 10.0mV/�� (2���`150��) �̂��߁A3.3V�d�l��ADC�[�q�ɒ������n�j�ł����A�|���̂ŁA���}�̂悤�� Rail-to-Rail �@�ʼn�悤�ɂ��܂����B�@�i�{���́A�ʂ̃Z���T�̑����Ɏg���� OP-AMP �̂P�����܂��Ă����̂ŁA�g���܂����j
 |
|
�i�Q�O�O�U�N�P�Q���Q�X���j
���N���F�X�Ƃ���܂������A�Ȃ�Ƃ��傫�ȕa�C�A������Ȃ��N�z���ł������ł��B
�v�����̍X�V���~�܂��Ă��܂����Ƃ����������i�����Ă����������قǁj�̂ŁA���N�i�S���ȍ~�ł����j�͂������������Ă��������Ǝv���܂��B�@����Ȓ��A�X�V�̂��тɎ��グ�Ē����܂���denno_ono�����ɂ͊��ӂł��B�@���Ă���������������������邩�炱���A��������Ƃ������̂ł�����ˁB
����ł́A�F�l�A�ǂ����N���B�B�B�i�������������߂ė��s�ł��j
 |
�ǐL�j�@���N�́A���̃W�S���[����ōs���܂��̂ŁA�F�l�����m�肨�����B�B�B
�i�Q�O�O�U�N�P�Q���R�O���j
�����܂��Ă��߂łƂ��������܂��B�@�{�N����낵�����肢���܂��B
�A�x�̐��ʂ́E�E�E�B�@�z���i���������j�ƃz�[���|�W�V�����ݒ�ƁA�n���Ȋ����ł����B�@��������́A�ȑO������\�[�X�ő����݂���s�������Ă݂悤�Ǝv���Ă܂��B
����������̂ł����A���̑S���̃T�[�{�Ɍ��������ēd����������u�Ԃ��āA��Ɋ������܂��ˁB�@�����Ɠ����Ă���ē�����O�Ȃ̂ł����A���̒ʂ蓮���Ƃ��̊����̓v�����f���݂����Ȋ����i��g�ݗ��Ă�̂Ƃ͈���āA���b�V���@�Ƃ������������ł��ˁB
���N���n���ɃR�c�R�c�ƍs�������Ǝv���܂��B�@�Ȃ��Ȃ��ǂ��i���Ȃ̂ŁA���̒��q�ł���������Ȃ��A�Ǝv���܂��B
 |
����̐���n�́A���ƃ����h�Z���̂Q�ɕ����� ���ڂ��Ă܂��B�@���ꂼ��̏ꏊ�ɂ́A �@�E������ �@�@�@�e��Z���T�[�A�`�c�ϊ��@�ASD-Card�A �@�@�@�T�[�{�ւ̕��z�@�𓋍� �@�E�����h�Z�� �@�@�@�k���o���d�r�A���C���b�o�t�{�[�h�A �@�@�@�f�o�b�O�p��ZiGBEE �𓋍� �_�̂Ƃ���ŕ��M�t�@���̓��ڂ�����܂������A �W�S���[�͂܂��߂ɕ��M�̂��߂ɓ��ڂ��Ă��܂��B ����̂������ŁA�b�o�t�͗₦�₦��Ԃł��B �B�����[�h�ł������蓮�삵�Ă܂��B |
 |
 |
�i�Q�O�O�V�N�P���W���j
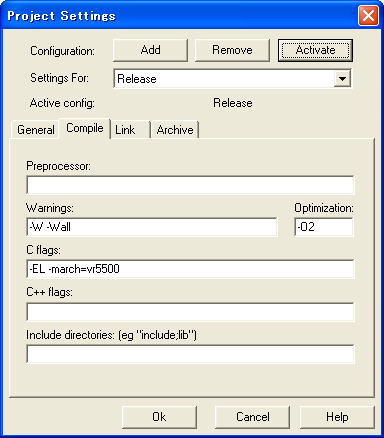
�b�R���p�C���̕Ȃ�m�邱�Ƃ͑g�ݍ��݃}�C�R���\�t�g��������ŏd�v�ȂȁA�ƍĔF�����܂����B�i�R���p�C���̃I�v�V�����Ɉˑ�����̂����R�̂��Ƃł��B�@�ȉ����ł��j�@NEC �G���N�g���j�N�X�� 78K0 �V���[�Y�̃}�C�R�����g���ăA�i���O�n�̃Z���T��荞�݂����Ă����̂ł����A�ȉ��̂悤�Ȍ��ʂɂȂ�܂��B
integral = (((unsinged char)1 << bitshift) - 1) & (MAX_SAMPLING - 1); |
101: mov a,_bitshift 102: or a,a 103: mov c,a 104: mov a,#01H 105: bz $?L01 106: add a,a 107: dbnz c,$$-5 108:?L01: 109: mov a,x 110: dec a 111: and a,#01FH 112: mov _integral,a |
integral = (unsigned char)(1 << bitshift); integral--; integral &= (MAX_SAMPLING - 1); |
201: mov a,_bitshift 202: or a,a 203: mov c,a 204: movw ax,#01H 205: bz $?L02 206: xch a,x 207: add a,a 208: xch a,x 209: rolc a,1 210: dbnz c,$$-5 211:?L02: 212: mov a,x 213: mov _integral,a 214: dec _integral 215: and _integral,#01FH |
���̃\�[�X�́A���ω��������邽�߂̐ώZ���� integral �������s�������̂ł����A���ϒl���Ō�ɋ��߂�ۂɊ���Z���Əd���̂ŁA�r�b�g�V�t�g�ŕ��ϒl�����߂����ƍl���āA�ώZ�����r�b�g�V�t�g�l�ibitshift�j���x�[�X��
integral �l�����������Ă��镔���ł��B
�@�Q�̗�������Ă܂��B�@�����ȈႢ���A�Z���u�����x���ł͕ς���Ă��邱�Ƃ����Ď��܂��B�@�@�@�b�R���p�C�����̃��[�j���O�h�~�̂��߉�����
(unsigned char) �w��B�@���������ʒu�ɂ���ẮA�W�r�b�g���Z���A�P�U�r�b�g���Z���H���ς��܂��B�@�R�[�h�����Ⴂ�܂��ˁi101-107�s�ڂ�201-210�s�ڂ̍��j�B�@�A�@���Ƃ���̃f�o�b�O�����₷���悤�ɂ��邽�߉��i�̂悤�ɕ������ď����Ă݂��̂ł����A�A�Z���u���̃R�[�h��213�`215�s�Œ��ڕϐ����i�[����Ă��郁�������A�N�Z�X���Ă���̂��݂āA�Ȃ�Ė��ʂȂ낤�Ǝv���܂����B�@���A����ŁA��������Ă��闝�R���������邱�Ƃ��K�v���ȁA�Ǝv���܂����B�@���i�̕��́A�������A���荞�݂��r���Ŕ��������ꍇ�ł��A�v�Z�r����
integral �f���������A�Ƃb�\�[�X�����肪�l���Ă���̂�������Ȃ��A�Ƃ����z���Ő��������f�����Ă���ƌ����܂��B�@�������A���Ɋ����݂�
integral ���g���悤�ȃP�[�X�̏ꍇ�A�v�Z�r���� integral �l���g���̂͊댯�ł��邱�Ƃ͂����܂ł�����܂���ˁB
�@�X�s�[�h�̓_�A���f�̂���������čœK�����Ă����̂́A�Ō�͑g�ݎ�ł���l�Ԃɂ��Ƃ��낪�傫�����A���S���ȂƎv���܂����B
�@����������������P�����߂��Ă������ƂŁA�����b�o�t������SEMB1200A�Ƃ̒ʐM�ŃX���[�u���ɂȂ�{�[�h�B�̃`���[�j���O�́A�قڏI�������������܂��B�@78K0 �}�C�R���ɂ́A�W�����̂`�c�b�ƂR�������x�A�R���W���C���A�R���n���C�̐ϕ��E���ϒl�v�Z�A����Ƀv���X�e�R���g���[���̎�M�������Ă��܂��悤�ɂ��܂����B�@���\�d�������ł����A�T�[�{����������P�O�O�ʂ��������x�ɏ����Ȃ����Ƃ��Ă��Ή��ł���i�ʐM�G���[�������ăn���O�A�b�v���Ȃ��A�Ƃ����Ӗ��ł��j�悤�Ɏd�オ���������ł��B
 |
�i�Q�O�O�V�N�P���Q�W���j
�i������Ɨ]�k�ł����E�E�R�R�̂ǂ����ɖ{�Ƃ̕��̓��e�˗��L�����ڂ�܂����j
KRS-4014HV �� ICS2.0 �̒ʐM���x�́A�ǂ̒��x�܂ŏ����i���߁j�T�C�N�����������ł���̂ł��傤���H
�{�[���[�g�͌��܂��Ă���̂ŁA�L���v�`�����[�h�Ńf�[�^���A���Ă���܂ő҂��Ԃŗ������Ă���ƌ����܂��B�@�ȉ��ASEMB1200A
�̊g�� UART3 �ɂĎ������Ă݂܂����B�@�T�[�{�̃t�@�[���o�[�W�����ɂ����Ǝv���܂��̂ŁA�����l�ɂȂ�Ȃ����I�ƌ����ꍇ�͂��߂�Ȃ����B
UX1200E �ɓ����Ă��� 33MHz �̃N���b�N�x�[�X��Timer-TC#0 ���g���đ��肵�Ă݂܂����B�@�P�����炢�̘A�����萫���݂Ă��܂��B�@�^�C�}�����ݎ�����TRY&ERROR�i�ǂ����݂�0.05msec�I�[�_�[�Œ������Ă܂��j
���J��Ԃ������ł́A1.10msec �ʂ̎����ł���A���Ȃ��L���v�`���̂��߂̃f�[�^���Ԃ���Ă��Ă���݂����ł��B�@���̒l�łR�O�����炢�A�����Ă݂܂�������肱�ڂ��͖����悤�ł��B
�Ƃ���ƁA���̎�������������Ǝ��A�f�[�W�[�`�F�[�������Ă����Ȃ��i�M�����������邱�ƂȂ��j�T�[�{���䁕�L���v�`�����ł���͂��B�@�܂��́A���̐��l��M���Ă���Ă݂悤�B
�����悤�ɁA�L�����N�^���X�e�B���O�`�F���W�@�\�A�X�g���b�`�ƃX�s�[�h�ύX���s���Ă݂܂����B�@���ʁA�X�g���b�`���X�s�[�h���A1.10msec. �ł����B�@PWM �̃L�����N�^���X�e�B���O�`�F���W���ƁA�|�W�V�����L���v�`���̎�荞�ݕ��܂ł���̂ŁA6�`10msec.�������Ă������Ƃ��炷��ƁA�X�s�[�h�A�b�v���ł��Ă܂��ˁB
�����āAKRS-4000 �� ICS2 �@�\�͂��炵���ł��B�@�P�Q�V�i�K�ŔC�ӂȃ^�C�~���O�Ő�ւ��ł���̂ł�����B�@�܂��A��ւ����������₢�I�i�����Ă�����Ȃ�A�L���v�`���Ȃ��̐���R�}���h���~���������B�B�B�j�@�����łP�C�ɂȂ�̂��A�X�g���b�`��X�s�[�h������������R�}���h�́AEEPROM�����������Ă���̂��낤���H�@�d������Ă��L�����Ă���݂����Ȃ̂ŁAEEPROM�����������Ă���Ɛ����ł����ł����AEEPROM������Ȃɕp�ɂɏ��������đ��v�Ȃ��̂Ȃ̂ł��傤���B�B�B�@�������ł͂Ȃ��A�`���[�j���O�܂߂�ƁB�B�B�@��������A�l����̂͂�߂悤�B�@�l���Ăǂ��ɂ��Ȃ���̂ł͂Ȃ��̂ŁB
�������킳�@����w�d�C��������Áu�Q�^�P�V�̊֓����K��v�ɎQ����\���B�@�悵�A�^�[�Q�b�g�͌��܂����B�@�����܂łɏ��Ȃ��Ƃ��������{�b�g����낤�i�Ȃ�ƒႢ�ڕW�l�A�ƌ���Ȃ��悤�Ɂj�B�@�ł��Ă��Ȃ��ꍇ�́ASEMB1200A �̎g�����u����A���낢��Ȃ��b�����܂��傤���ˁB�i���������̕������҂���āA���{�b�g�͓����ȁI�Ƃ����l�������肵�āB�B�B����͎₵���ł���I�I�j
�i�Q�O�O�V�N�P���R�O���j
�����������ȃ^�C�~���O�ŁA���ꂵ�����[�����͂��܂����B
MIT (�}�T�`���[�Z�b�c�H�ȑ�w�j������ KHR2HV + SEMB1200A �Ƃ����g�ݍ��킹�ɂ�郏�[�N�V���b�v������A�X�|���T�[�y�[�W�Ɏ��̃��C�u���������g�����Ƃ������ƂŁA�ӎ��i�X�|���T�[�y�[�W�̈�ԉ��j���f�ڂ��Ă��������܂����B�@MIT��WebSite �Ɍl�����ڂ�Ȃ�āA���ꂵ������ł��I�@SEMB1200A���[�U�[�����[���h���C�h�ōL���邱�Ƃ����҂��܂��B�@��H���������āA������̃y�[�W���p��A�t�����X��A�h�C�c��A�X�y�C����A�|���g�K����A������A�؍���B�B�B�@����܂��l����͎̂~�߂Ă������B�@�l�ŗV��ł���킯�����B
Course info �y�[�W���݂�ƁA���[�N�V���b�v�Ŏg��ꂽ�h�L�������g���_�E�����[�h�ł��܂��ˁi�������ł��j�B�@�ׂ����Ƃ���܂Œ��J�ɓ��ڂ���Ƃ��̒��ӓ_��������Ă��āA�Q�l�ɂȂ�܂��B�@�J�����̃A�i���O�{�[�h�A�R�c���[�V�����Z���T�[�Ȃǂ����ڂ���Ă��āA���������������������������Ƃ������̂ł��B�@����A������ libsemb.a �Ƀ��N�G�X�g�i�o�O���ȁH�j�����Ă���܂����̂ŁA�ǂ����̃^�C�~���O�ʼn��ł�i�߂����Ǝv���܂��B
KHR�V���[�Y���������ŁASEMB1200A���g���Ă݂����ȂƎv���Ă�����������A�Q�l�ɂ���Ă݂Ă͂������ł��傤���H
�i�Q�O�O�V�N�Q���S���j
�i���ꂵ���ߖH�j
�悤�₭�A���s�e�X�g�B�@�������AKRS-4014HV �̓g���N���O�̂��̂ɔ�ׂĂQ�{�������āA�����Ƃ������A�e��ł��銴���B�@���o���킩��Ȃ��B�B�B
�ŋ߁A�l�b�g�T�[�t�B�������Ă��Ȃ������̂ŁA�ӂ���ƎU���B�@�������A�Q�ڂŃX�g�b�v�B
�܂��A�������킳��̂Ƃ���ŁA�֓����K����B�@�Q�P�����B�B�B���\�W�܂�܂����ˁB�@���ƂP�T�Ԃ���̂ŁA����������Ƒ�����̂ł��傤�i��ѓ���Q���̕�������������ł��傤���j�B�@��H�@�uSEMB1200A
�̎g�����u���v�A��`���������Ă����ł��ˁB�@���Ԃ�A���ۂɎg���Ă���l�q���킩������낤�Ȃ��A�Ǝv���Ă��܂��B�@���Ɋ�]���邱�Ƃ�����܂�����A�����ɁB�@�����͂�͉ƂŐH�ׂĂ���o������̂ŁA�P�S�`�P�T�����炢�ɓ������Ǝv���܂��B
�����āAROBO-ONE �����T�C�g�B�@�悤�₭�G���g���[�ł���悤�ɂȂ����̂ł��ˁB�@�d�ʕʂɂ���H�@�R�Q�̂̒��ł̃o�����X�͂ǂ��Ȃ�́H�@�d���̓G���g���[�̍ۂɋL�ڂ������̂��̗p�����H�@�Q������A�R�����䂪�������ł��ˁB�@�R��������̂ƒ����Ȃ��̂ł́A���{�b�g�̃p���[���_���`�ȋC������i�����T�C�Y������Ă���̂ŁA�����̍��͑傫���j�B�@���ꗿ���R�l�ڂ��炩����̂����B�B�B
�ڂ��`���Ƃ��Ă���ꍇ����Ȃ��Ȃ��B�B�B�����Ƃ��Ȃ���B
�i�Q�O�O�U�N�Q���P�Q���j
�O�Ɏg���Ă������[�V�����V�[�P���T�� JiGoRoHP �����ɍ�蒼���B�@ICS2 �Ή��őS�T�[�{�̃X�g���b�`�A�X�s�[�h�������\�Ɂi�������AExcel �f�[�^�Ƃ��ĕۑ�������j�B�@�ȑO�g���Ă���easy com (ec) �͎g�킸�AMSComm ���g���� Excel 2003 �� Visual Basic 6 �ō��Ȃ����i���ς�炸 Basic �Ɋ���Ă��Ȃ����߁A�_���_���Ə������v���O�����ɂȂ��Ă��܂����j�B�@�����F�S�T�[�{�����ݒ��w��T�[�{�̂ݐݒ肪�\�^����M��LOG�������^Excel �V�[�g�Ƀf�[�^��������Ă��邽�߁A�ҏW���ȒP�^�o�^�f�[�^�̘A���ݒ�ɂ��ȈՃ��[�V�����`�F�b�N�\�B�@�����ō�����f�[�^�́ASEMB1200A �̃t���b�V���������ɏ������ޗ\��B�@�f�[�^�̈�Ƃ��ĂQ�l�o�C�g������̂ŁA�d���������ɓf���o�����f�[�^�����̂܂ܔz�u���Ă����ӂ�Ȃ��B�@�]�T������̂͂������ƁB�@���Ƃ́A���̎��ԓI�]�T������B�B�B
 |
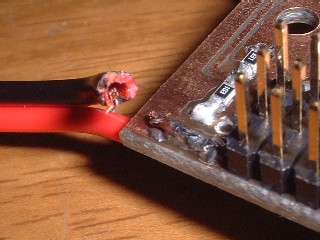
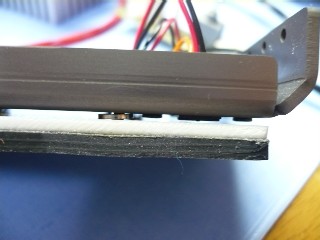
������ƑO�ɂ���Ă݂��AJiGoRoHP �Ȃ�̓��ҕ⋭�B�@���ɑ���ӂ�̓������������̂ŁA�P�[�u�����~�߂Ă������r�V�[�g����Ă��܂����i���ʐ^�̍����j�̂ŁA���ʐ^�̉E���̂悤�ɕ⋭�����Ă݂܂����B�@���Α��́A�P�[�u�����ʂ��Ă���킯�ł͂Ȃ��̂ł����A�l�W���Ƃ����o�������Ă���̂ŁA������������߂�H���߂ɓ����v���[�g��t���Ă݂܂����B
 |
 |
����́A�֓����K��ɂ������ł����B�@�҂��Ă��������Ă������A���߂�Ȃ����B�@�̒��𐮂��A����ɔ����܂��B�B�B
�ߓ��Ȋw����� KRS-401x �V���[�Y�Ɏg���Ă��� ICS2 �l�^�ł��B
����̋L�ځF�����łP�C�ɂȂ�̂��A�X�g���b�`��X�s�[�h������������R�}���h�́AEEPROM�����������Ă���̂��낤���H�@�d������Ă��L�����Ă���݂����Ȃ̂ŁAEEPROM�����������Ă���Ɛ����ł����ł����AEEPROM������Ȃɕp�ɂɏ��������đ��v�Ȃ��̂Ȃ̂ł��傤���B�B�B�@�������ł͂Ȃ��A�`���[�j���O�܂߂�ƁB�B�B�i�����܂Łj
�Ə������̂ł����A�}�j���A���ŏI�y�[�W�ɂ����Ə����Ă���܂����ˁB�@����^�C�~���O�ɂď������݂����{����A�ƁB�@�ł��A�ǂ������^�C�~���O�ȂH�H�@�d���n�m����́A�d���n�e�e�̏�Ԃł͂Ȃ��\��������A�Ƃ����Ӗ��ł͂Ȃ��̂ł��傤���H
�i�Q�O�O�V�N�Q���P�W���j
�C���]���Ƀl�b�g�T�[�t�B���B
�@�EROBO-ONE 11����̏o��҃l�^����������A�Q�l�ɂȂ�܂����B
�@�E���{�b�g�����C�x���g�Q���Ƃ��̘b�肪�����A���p�ҁH�ł��ˁB
�����āA�F����撣���Ă���I
�@�\�I���i�R������˔j�������Ƃ̖������������̂����ł����A����A�葫�̒������ς�����Ԉ���āA�\�I�ɏo��Ȃ����{�b�g�������̂ł͂Ȃ����H�ƐS�z�ɂȂ�܂����B�@�l�b�g�T�[�t�B�����Ĕq�����������ł��B�@���͑����������̎���`���|�C���g�i�x�������͊W�Ȃ��A�s�b�`�E���[�������瑫���܂ő���j�A��́A�L������ԂŁA���̉�]���Ƃ͊W�Ȃ��B�@�܂�A��́A�����Ă��̃��{�b�g�͉������ɉ��낷���A�S�T�x�Ƃ��A�߉��ɐL������Ԃ������Ƃ������Ȃ�͂��i���̃p�[�c�̊p����A���܂ő���j�B�i�Ƃ���������Ȃ����������̂ŁA�}篎��̃p�[�c����蒼���܂����B�j
�Ƃ肠�����A�W�S���[�g�o�̐i���B
�@�E�@�����s�v�Z�@�E�E�E�@�O������ɑΉ��ł��Ă���̂ŁA���Z�㖳���͂Ȃ������B�@�i���s�X�s�[�h�̒������c���G�l�����l�̔c���j
�@�E�@�����]���@�E�E�E�@�������Ȃ��ł��܂����B�@�P��̑��グ�łR�O�x���炢�͊y�ɉ��邱�Ƃ��m�F�i�X�O�x���炢��点�������B�B�B�j
�@�E�@�W���C���ɂ��p����@�E�E�E�@������ł����B�@MDP-A3U9S-U�i�W���C���E�����x�E�n���C�R��������Z���T�j�������i78K0�}�C�R���Ƃ̒ʐM�܂ށj�B
�@�E�@�R���g���[���ɂăg�R�g�R��������@�E�E�E�@������o�����B�@�S�̂̐i�݂͒x�����A�e���W���[�������x�������̂ŁA���킹���Ƃ��̃o�O�����Ȃ��B
�@�E�@�\�I�l�^�@�E�E�E�@�꒵�тƐl�̖��ɗ����Ƃ́A�C���[�W�͏o�����B�@�d���݂��Ԃɍ������H�H�ł͂Ȃ��A�Ԃɍ��킹��̂��I�I
�g���N���傫�ȃT�[�{�Ȃ̂ŁA�v�Z�ǂ���ɓ����Ă���ď�����܂��B�@���Ƃ́A�N���オ�胂�[�V�������ł���A�\�I���i�R���͂ł������ƂɂȂ�܂��B�@�悤�₭�A�����܂łł��������B�B�B�Ƃ��������ł��B
�i�Q�O�O�V�N�R���T���j
�i������Ɨ]�k�ł��j
ROBO-ONE ���Ɍ����Ē������B�@�������A�����Ȃ�Ȃ����{�I�ȂƂ���Ŕ����Ă���悤�ŁA�R���Ƃ������B
���������͂����R���́A�ӊO�ƌy���̂ŁA�����܂����i�����Ƃ��낪�Ⴄ�H�j�B�@�c�N��������ƂP�T�[�{�قLj���������Ƃ������ƂŔ����܂������A����ς�Q�T�[�{�Ƃ������Ƃō������������ȁH�H
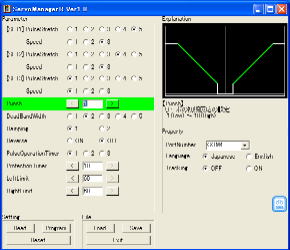
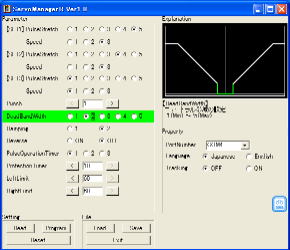
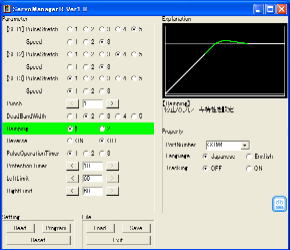
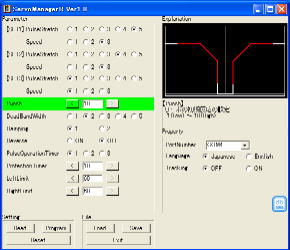
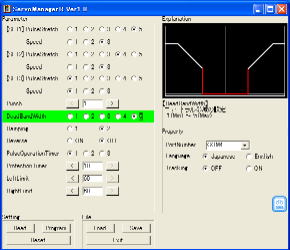
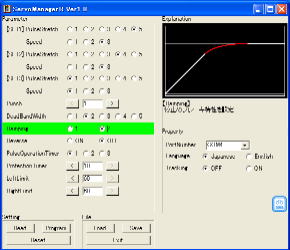
���ƁA�ߓ��Ȋw�T�[�{ ICS �ݒ�� Punch, DeadBand, Damping �̐��l�召�������킩��Ȃ��Ȃ�̂ŁA�������B�B�B�iICS, ICS2 �ő召�������ł��邱�Ƃ����҂��āE�E�E�j
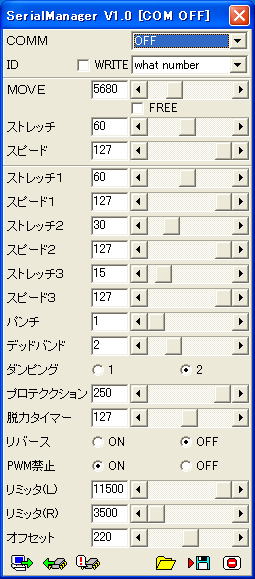 |
Punch | Dead Band | Damping | |
 |
 |
 |
�� | |
 |
 |
 |
�� |
�܂��܂��A�����ł����A�q�n�a�n�|�n�m�d�B�@����́A�C����������Ē��������Ă��đ̒�������܂����B�@�����ƌv��I�ɂ��Ȃ��Ƃ����Ȃ��ȁA�Ǝv�����ʁA�q�n�a�n�|�n�m�d�ɏo�ꂳ��Ă�����X���@���ɐ��������ǂ�����܂��B
�Ƃ�����A�O�i���܂��傤�B
�i�Q�O�O�V�N�R���Q�U���j
�����͌��܂���B�@SEMB1200A �������iCygwin �� Linux �ł̃R�}���h�g���łȂ����j�ł��B�@����ŁA�ǂ����I
�i�⑫�F������͖��������̂ł����A�z�z�ł������ȂƂ���܂ŗ����̂ŁA�e�X�g�o�[�W�����Ƃ��āASEMB1200A �y�[�W�ɋ����Ă����܂��B�@�����A�܂��A.bin �̃t�@�C����������ō��Ȃ��B�B�B�j
 |
�c���́A�ȉ��̒ʂ�B
�@�E�@objcopy �����s�ł���悤�ɂ������i .out �܂ō��邪�A.bin ���o���Ȃ��j�@�E�E�E�@�Ȃ̂ŁA���ꂾ���̊��ł́A�܂��������ł��B
�@�E�@gdb �ɂ��f�o�b�O�iSim�j���ł���̂��H
�i�Q�O�O�V�N�S���P���j
����́AOno-ONE �ł����B�@�撣�����b�オ����܂����B�@�L��������܂��B�@���@denno_ono����
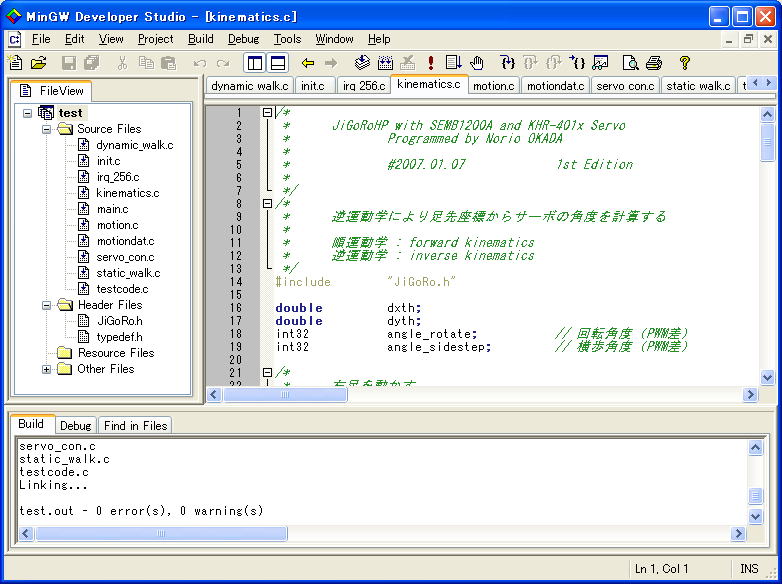
�F�X�ƒ��ׂĂ݂��̂ł����AMinGW Developer Studio �ł����AFullSet version
�łȂ��Ă����\�z�ł���݂����ł��B�@����ɁA.out(ELF)����.bin �����ɂ����ẮAWindows�W����
command.com ���ŁAPATH ���� /MinGWStudio/MinGWmipsel/bin ���w�肵�Ă���Amipsel-semb-objcopy
�����s�ł��A�����ł��邱�Ƃ��킩���Ă��܂����B�@�J������ Cygwin ����A�����J�����ɂł������A�Ƃ������ƂŁA���[�U�[�������邱�Ƃ����҂��܂��B�B�B
�i�Q�O�O�V�N�S���Q���j
����ɁA�킩���Ă��܂�����B
MinGW Developer Studio �ł����AC:\MinGWStudio\Templates �ɁActl �t�@�C��������A���ꂪ�A�v���W�F�N�g�����̍ۂɃI�v�V�����Z�b�g����鍀�ڂ��L�ڂ��Ă���t�@�C���̂悤�ł��B�@�V�������O�œo�^����i���Ƃ��ASEMB1200A.tpl�j�Ƃ����Ă��I���ł��Ȃ��̂ŁAWindows Console �� SEMB1200A console �ƒu�������Ďg���̂ł���A�R�� console.tpl �ɒu�������Ă��炦��A�v���W�F�N�g�������Ƃɐݒ�����Ȃ��Ă��悭�Ȃ�܂����B�@����́A�g���܂���B
���ƁA�͉����ł����AWindows �v���O���������傱���傱�����Ă݂āA.out(ELF) �� .bin �ɏ���������v���O��������ꂻ���ł��iELF�w�b�_��̓v���O�������j�B�@�ėp�ł͂Ȃ��ł����ASEMB1200A �v���O�������炢�Ȃ�A�Ή��ł���A�Ƃ����@�\����Ń����[�X�ł��邩������܂���B
�����Ȃ��Ă���ƁA�����J�����̐������I��肪�݂��Ă��������ł��B
�����܂ł̂܂Ƃ߂��ēx SEMB1200A �y�[�W�ɏ����Ă����܂����B
�i�Q�O�O�V�N�S���Q���@�Q�R�F�O�O���j
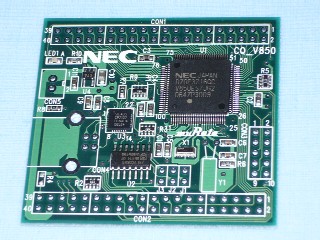 |
�`�F�b�N�R��Ă܂����B�@CQ�o�ł� Interface�� 5 �����ɂ� V850������t���Ă��܂��ˁB
����܂ł�V850��͏������������������Ă����̂ł����A�t�^�ɂ��āA\1,680�~�ƂȂ�Ɣ����ł��ˁB
���������A�F�X�Ƃ���Ă݂悤�Ǝv���܂��B�@CSI(SPI), UART, I2C �����`�����l���������Ă���̂ŁASEMB1200A
�̎q�{�[�h�Ƃ��Ă��g���܂��ˁB
�i�Q�O�O�V�N�S���U���j
 |
���{�b�g�̎���������̂Ɠ������ɐ��܂ꂽ���j���A�����A�c�t���̓��������}���܂����`�B
�����̃l�^�͂Q�ł��B�@�A�C�e�������܂����A�ƁAMinGWDeveloperStudio �Ƃ̃R���{�ɂ��Ăł��B
 |
�P�A�C�e�������܂����B�@���R���ł��B
�O�O��ƁA�ʔ̂ň���������Ƃ��낪������������܂����B�@����́A�R�R�ōw�����܂����B
���{�b�g�̃l�W����ׂ��Ă��܂��āA�����e�������Ă��܂����Ƃ��ɁA���܂��B�@�l�W�����ɍ����Ă�����́A�������l�A���ł��B�@�ᓪ�l�W�ł��O���܂����i�������A���E�͂���Ǝv���܂����A�莝���̂��̂͑��v�ł����B�j�@���{�b�g�̃l�W�͊ɂݎ~�ߍ܂����Ă��邱�Ƃ������Ǝv���܂��̂ŁA�����������ŊO���H��͕K�{�A�C�e���ł��傤�B
�ꉞ�Agdb �ȊO�͂ł������ȁH�@MinGWDeveloperStudio �Ƃ̃R���{�� mipsel-semb-elf ���������J�����ɐ��܂�ς��܂����B
�����J���s���� .ld �t�@�C���ɕs����������̂ƁAmipsel-objcopy.exe ��������̂œ��ꂽ�o�[�W�������R�R�ɃA�b�v���Ă����܂����B
ELF(.out) �� .bin �ɕϊ�����\�t�g�Ƃ��āAmipsel-objcopy.exe �����܂����B�@�g�����́ASEMB1200A �y�[�W�ɏ����Ă����܂����̂ŁA�Q�Ƃ��������B�@��ԊȒP�Ȃ̂́Amipsel-objcopy.exe �A�C�R���ɕϊ������� .out �t�@�C���̃A�C�R�����h���b�O���邾���̕��@���Ǝv���܂��B
�i�Q�O�O�V�N�S���V���j
�l�W�U�E���X�l�^�ŁA�������킳�烊�N�G�X�g���܂����B�@����́A����Ƃ����Ă������`���B
�����́A�܂��܂��ASEMB1200A �̓����J�����l�^�ŁB
MinGW Developer Studio �����ł͂Ȃ��AVisual MinGW �ł��A���� MinGW(MSYS) ���ō���� mipsel-semb-elf �c�[�����g���邱�Ƃ��킩��܂����B
Visual MinGW �̕����AWindows API�J���ɓ��������`�ō���Ă��Ȃ��̂ŁA�V�b�N�����邩������܂���B
�ȉ��AScreenshot ����������Ă����܂��B
 |
 |
 |
 |
 |
�i�Q�O�O�V�N�S���P�S���j
�������킳���̃��N�G�X�g(4/8)�ɂ��������� (^^; �l�W�U�E���XM2���g���ĊO�����l�W���Љ�܂��B
 |
�U���ŊO��Ȃ��悤�ɁA�l�W�̊ɂݎ~�ߍ܁i�A�������ݎ~���j���g���Ă��܂��B�@���ꂪ���F���Ȃ��Ă��镔���ŁA�P�H�ł悢�Ƃ��������������Ă��܂��āA���Ȃ��Ȃ����E�E�E�Ƃ����l�W�ɗL���ł����B�@�g���Ă���l�W�́A�قƂ�ǁA�ᓪ�l�W�ƌĂ����̂ŁA���̌����� 0.5mm ���x�ł��B�@�l�W�̓�������ʼn̂ŁA���̎��肪���^���F�ɕϐF���Ă��܂��B�@�ق�̏��������̊p�x�ł��邱�Ƃ��ł���A���Ƃ̓h���C�o�[�ʼn܂����B�@�����A�^�Q�̃l�W�݂����ɁA�{���������Ă��܂������̂́A����]������ʼnA����ʼn��J��Ԃ��Ȃ��Ƃ����Ȃ��̂ŁA������Ƒ�ς��ȁH�@�ł��A�����ƊO���̂ŁA�撣���ĉ܂��傤�B�@�l�W�U�E���XM2 �̐悪�Ƃ��Ă��������̂ŁA�����Ƃ���ɂ���l�W����������O���܂����B
 |
�����P�Љ�B�@�T�[�{�̏o�͎����ۂ�����܂��A�Ƃ����̂����ɂ��܂����A���͂P�����ł����A��̎ʐ^�E���̂悤�ɃT�[�{�z�[�����|�b�L���O��܂����i����������ȃT�[�{�z�[���j�B�@�ǂ����Ă���ȕ��ɊO��Ă��܂���ł��傤�ˁB�B�B
�i�Q�O�O�V�N�S���P�T���j
�l�W�U�E���X�A�Ȃ��Ȃ��D�]�ł��ˁB�@�݂Ȃ�����A�l�W�O�����ł��Ȃ��Ē��߂Ă��܂��H
������ƋC���������āA���[�^�h���C�o������Ă݂悤���ȂƁB
���ɐV������@���������킯�ł͂Ȃ��̂ł����B�B�B�i��R�l�͕ς���\��j�@�f�v���ɂ�낤�Ƃ������Ƃ��A���傱���Ƃ��l�^�d���݂��Ă���܂��B
 |
 |
�i�Q�O�O�V�N�S���P�V���j
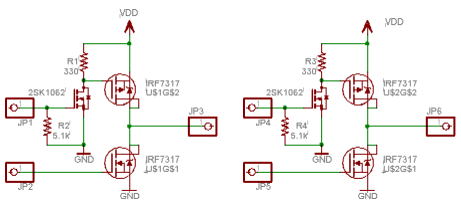
�ߓ��Ȋw�i���j����� ICS2.0 �Ɠ��� UART ���@���g���A�T�[�{�̐�ɂ���
CPU �Ƃ̒ʐM���ł���̂ł͂Ȃ����H�Ƃ������ƂŁA����Ă݂悤�Ǝv���܂��B
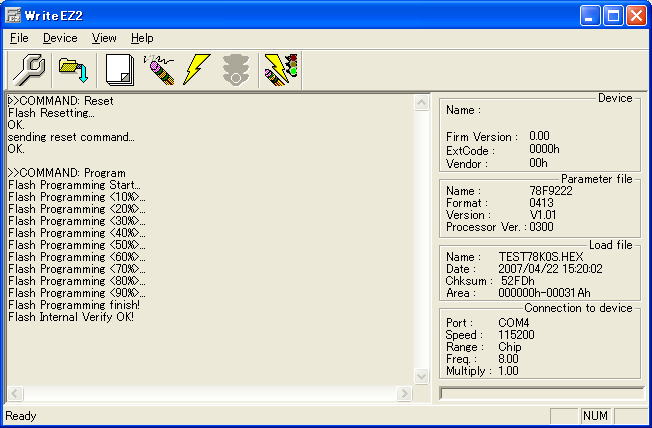
�܂��́A��P�e�Ƃ��āA�ȑO�A�w�����Ă��� uPD78F2222�݊����T���n���g����� 78K0S/KA1P CX �̃v���O���~���O�ƃt���b�V��ROM�����B
uPD78F2222 �݊��Ȃ̂ŁA�R�R�ɂ���t���[�̃��C�^���������ł���A�J�����������͂��B�@���������A���c�t���B�@8MHz �� OSC ���Ȃ��̂ŁA���Z���L���Z�L�� EX03J 16MHz �������ăN���b�N�͍��܂����B�@uPD78F2222 �݊��ł����A�s���z�Ⴄ�̂ŁA���ӂ��B�@X1/P121(pin#2 -> #7), X2/P122 (pin#3 -> #8), RESET/P34 (pin#6 -> #11), VDD (pin#5 -> #10), VSS (pin#1 -> #6)�B
 |
�n�[�h�쐬���I�������AWriteEZ2 �� PM plus �ɓo�^���Ď��s���邾���B
 |
�܂�����Ă݂悤�Ǝv���Ă���̂��A������̊����Z���T�� ADC �Ŏ�荞�݁A�]������A�Ƃ��������̂��́B�@����ŁA������������A�����̗͂̂�������𑪒肵����ł���͂��B
ICS2.0 �ƍ������Ȃ��悤�ɂ���ɂ́A�@�ʐM�f�[�^�i�R�}���h�j�̍ŏ�ʃr�b�g��
1 �̏ꍇ�A�R�}���h�Ƃ��ĔF�������B�@�f�[�^�͉���7bit�ŒʐM���s���K�v������B�@�A�f�[�^��7bit
�̔{���łȂ���A�ʐM��f�[�^�ʂ����ʂɑ�����B�@�iADC �� 32��ϕ��Ƃ��A14bit
���Ƃ��邱�Ƃɂ����B�j�@�B�ʐM�� 5V-TTL ���x���ōs���K�v������B�@�ł���A�ψ��͍����ق����悢�B�@�C�g����������TxD�i���M�j�[�q��Nch
Open Drain ���[�h�œ��삷�邱�Ƃ��K�v�A�ƌ����Ƃ���ł��傤���B
 |
�Ƃ肠�����A�����Z���T���Љ�B�@�M������̊����Z���T(AGB65-4FS)��ڑ����܂����i�ʐ^�̊W�ŁA�P�[�u���͊O���Ă���܂��j�B
�i�Q�O�O�V�N�S���Q�Q���j
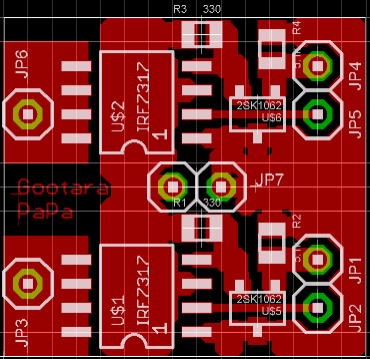
����� ICS2.0 �ƍ������Ȃ��P���� UART �̎����Ɍ����āA�⑫�����ł��B�@�P���ɁAUART �̑���M�M�������C���[�h�n�q����ƁATxD�i���M�j�� High ���Ƀh���C�u���Ă���ƁARxD �i��M�j�Ƀf�[�^����荞�߂܂���B�@�����ŁA�ȉ��̂悤�ɂ��܂��B�@2SK1132 �� Nch-MOSFET �ł��B�@�ȑO�A�I���W�i���h���C�o����낤�Ƃ������ƂŁA��������ł������̂��������̂ŁA�Ƃ肠�����g���Ă݂悤�Ǝv���܂����i�����ƓK�Ȃ��̂����邩�Ƃ͎v���܂��j�B
 |
�@���̂悤�ɂł���̂́AuPD78F2222 �� UART6 �́ATXDLV6 �� 1 �Ƃ���ƁATxD �̏o�͂��X�g�b�v�r�b�g���܂ߑS�Ĕ��]���Ă����@�\�����邽�߂ł��i�⑫�����Ƃ��āAuPD78F2222 �̃��[�U�[�Y�}�j���A��[U16898JJ3V0UD00.pdf] p.198�����p�j�B
 |
�@TxD6 ����f�[�^�𑗐M���Ă���ہANch-MOSFET �̓Q�[�g�� ON/OFF �����̂ŁAGND �d�ʂ� High-Z ��Ԃ����܂��i���̂Ƃ��A����ׂ��f�[�^�����]���Ă�������s�����ǂ����Ƃ��킩��܂���ˁj�B�@TxD6 ���ʐM�����Ă��Ȃ��Ƃ��́ANch-MOSFET�� OFF �Ȃ̂ŁAHigh-Z ��ԂƂȂ�A�ʐM��j�Q���܂���B
�i�Q�O�O�V�N�S���Q�R���j
�i�\���j�@�T�^�Q�V�@�H�t���ʼn��������܂��I�@�i�q���g�́Adenno_ono ����̌f�����̂P�i2007/02/28-03/02, No.78-81)�ɂČ����Ă�����ł��j�@�ڍׂ͋ߓ��B
�i�Q�O�O�V�N�S���R�O���j
SEMB1200A-AB02 �A�i���O�{�[�h���R�c���[�V�����Z���T�i�����x���R���{�W���C�����R���{�n���C���R���j�Z�b�g�������ɂȂ�܂����ˁB�@���Ɍ��J����Ă������ɂ��ƁA�傫���́A�@35.56mm �� 30.48mm ��27mm�A�A�i���O�|�[�g���V�����J������Ă���݂����ł��B�@�ϕ��A���ϒl�̏o�͂����݂����ł��ˁB�@ADC 8ch��(ADC7) �̓d���Ď��ŁAP63�|�[�g���X�C�b�`���O����Ƃ������Ƃ́A�d��������d���ȉ��ɂȂ�����A�d�C�I�ɃX�C�b�`�n�e�e�Ƃ����̂��ł������B
 |
����Ȋ����ł悢���ȁH�@��R�� Nch PowerMOSFET �͓K���ɑI�Ԃ��ƂɂȂ�܂����A��Γd�������ł������Ă���A2SK3125(ON��R5.3m��, Id(DC max)=70A) �� NchPowerMOSFET �Ƃ��Ďg���A�d����������̂ł悢��������܂���ˁB�@+5V �͓K���Ɋ�ォ��q���܂����ˁB�@LiPO �o�b�e���̓d���Ď�����A�d�� ON/OFF �����[�U�[�ōs���悤�ɂ���A���S�������������ł��B
�i�Q�O�O�V�N�T���P���j
���������Z���T���T�[�{����M���Ɠ�����ŒʐM�����ăf�[�^���擾���铮��m�F���������܂����i�S�^�Q�Q�l�^�̑����ł��j�B
�M���������S�_�����Z���T�� OP-AMP(uPC842) �łP�O�{����������A78K0S/KAP1-CX �� ADC �œǂݎ��A�T�[�{����M�����Ƀf�[�^���̂��� SEMB1200A �Ńf�[�^�擾����Ƃ������̂ł��B�@�Z���T�ɂ��ẮA���ꎩ�g�̐��쌳�Ǝd�l�������Ƃ������o���āA�d�l���߂Ȃ������Ƃ���܂ōs���Ă��܂��܂����B�B�B
����̃|�C���g�́A�S�_�̃R�R�̈��͂�ǂݎ��Ƃ����̂�@���ɕ��U���S�_���A�����������Ŏ��邩�H�ɂ���Ǝv���܂����B�@�����ŁA���E�ʐ^�̂悤�ɁA�X�v�����O���b�V���[�Ƒ����ɔƋz���S�������t���邱�Ƃł���Ă݂܂����i���̓Z���T�����ŕ����邱�Ƃ͊m�F���������\���j�B�@�f�[�^�擾�̎����ɍۂ��ẮA�T�[�{��ɔz�u���ēK���Ȏ����ŃT�[�{�p�x�����ăT�[�{�Ɉُ�ȓ��삪�Ȃ����Ƃ��ɍs���܂����B
 |
 |
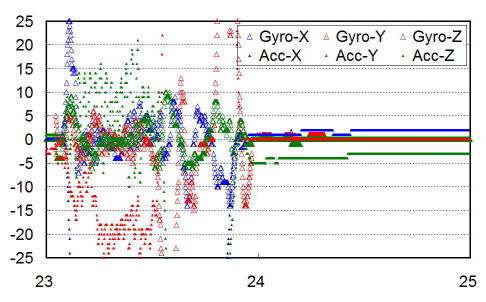
���ʁA�O���t�̂悤�ɁAADC��ϕ����Ď�荞�ޕ��@�ł��A���f�[�^��Ԃł��������悭���Ă��邱�Ƃ��킩��܂����i�ϕ��l�Ɛ��f�[�^�͕ʁX�̎����f�[�^�ł��j�B�@��ʼn������Ă̎����Ȃ̂ŁA�l���g�ɂ͂��܂�Ӗ�����܂���B
 |
 |
�Ō�ɂȂ�܂������A���� denno_ono ����A�d�]�ǐV���s������L�f�ځA�L��������܂��B�@�f�ڂ����ƁA���e�Ɋւ�炸�����̕��Ɍ��Ă��������Ă���݂����ŁA���荇�����ł܂��B�@����̓��L�ł����ASEMB1200A-�A�i���O�{�[�h�ł����A������y�[�W��ԉ�����_�E�����[�h�ł��܂���B�@�T�C�Y�ȂǏڍׂ��o�Ă��܂����i�l�i�̓V�}�t�W����̏�����A���̂����Ȃ��̂Ōf�ڂ��Ă��Ȃ��̂ł��傤�B�@�c�N�������RT���甭���ł��傤����A�������˂����Ă݂�ƒl�i���킩�邩���B�B�B�j�B
�i�Q�O�O�V�N�T���Q���j
�i�u�K��\��̂��m�点�j
�@�T�^�Q�V�i���j�ɏH�t����RT����ɂčs�� SEMB1200A �u�K��ł����A�ȉ��̂��Ƃ��l���Ă܂��B�@�����ŁA�Q���\��̕��A�Q���O�ɂ������������Ƃ��m�肽���Ƃ���]���������̕��A�ȂǁA���O�Ƀ��[����������Ɓi�ł���Ƃ���ɂ��Ắj���e�������������Ǝv���܂��B�@�����͂���������Ə�����܂��i���Ƀn�[�h�ʂ���]�����ꍇ�A�������ɂ����Ԃ�������܂��̂ŁA�����߂Ɂj�B�@���萔�ł����A�S�~���[���Ƌ敪�����邽�߁A���[���^�C�g���ɁySEMB1200A�u�K��z�Ɠ���Ē�����Ə�����܂��B
�A�W�F���_�j�i���̒S�����j
��1���j�@SEMB1200A �J���������@�i�����J�����̃C���X�g�[���A�@Cygwin
�ł̊��͊�]�҂�����Ύ���ɂ��������܂��j
�@�@�|�@�����I����Ă��܂����ꍇ�ASEMB1200A �̃n�[�h�E�F�A����̐����i���̂킩��͈͂ŁA�ł���j
�@�@�@�@�@�i��������ԁAPWM�o�́A�L���v�`���A�g��UART, �t���b�V��ROM�ǂݏ����A���|�C���g���ȁH�j
��2���j�@�iRT����\��j
��3���j�@SEMB1200A �v���O���~���O�̎��ۂƁA���Ӄf�o�C�X�̐���
�@�@�|�@SEMB1200A �̃^�C�}�����݂ɂ���
�@�@�|�@�T�[�{����iPWM���ƃV���A�����j
�@�@�|�@CSI(SPI)�@��iSD-Card, �A�i���O�{�[�h�i3D���[�V�����Z���T�܂ށj,
�R���g���[�����j�Ƃ̃f�[�^����
�Q���ɍۂ��Ď��Q�����������́j
�@�@�@SEMB1200A �ꎮ�@�{�@�d���@�{�@���{�b�g�i�T�[�{���j�@�{�@�P�[�u���ށiUSB-RS232C�ϊ��푼�j
�@�A�@�\�t�g�J���p�̂o�b�i�m�[�g�o�b�j
�@�B�@�e�����K�v�Ǝv�������͎̂��Q���������i�H��͑����͎����Ƃ������Ƃł����B�B�B�j
�@���@���������Q�������������̂́A�F����g���Ă�����Ӌ@��Ŏ��ۂɓ������Ă��������������߂ł��B
�@���@�����w���\��̕��A�d�����������ł��邩�H����_���Ǝv���܂��B�@�����Ȃ炨��`�����܂��̂ŁA���O�ɘA��������Ə�����܂��i���i�w���̂��߁j�B
SEMB1200A ���w���O�̕�
�@�V�}�t�W����̂��D�ӂɂ�莎��@���S��قǂ���ł��邱�ƂɂȂ�܂����i�ؗp�FSEMB1200A�{�́A�A�i���O�{�[�h�i�Z���T�����j�A���z�{�[�h�j�B�@SEMB1200A
�������Ă��Ȃ���A�Ƃ��������n�[�h��G��Ȃ���u�K������悤�ɂ��܂����̂ŁA�����Ă��Ȃ��������Q�����������B
�u�K��Q���葱���ɂ���
�@�Q�����@���A�u�K��̏ڍׂɂ��ẮART ����� Web �Ɍf�ڂ����Ƃ̂��Ƃł��̂ŁA���炭���҂����������A�Ƃ̂��Ƃł��B
�i�Q�O�O�V�N�T���S���j
�����́A�V�C���ǂ������̂ŁA�{�f�v�ł͂Q��ڂ̂��o���������Ă��܂����B�@���A����Ƃ͕ʂȘb��ł����A�߂��ɑ�w�̍��ǂ��s���Ă������[�������i�V����i�j�̃`�F�[���X���ł��܂����B�@���s�ɖ{�X������̂ł����A�֓��A���ɉƂ̋߂��ɂł����Ƃ����̂́A���ꂵ������ł��B�@�R�����{���I�[�v�����Ă��Ēm���Ă����̂ł����A����H�ׂɍs���Ă��܂����B�@���́A�����ł��B
�T�^�Q�V�u�K��ł����A�u�K��]�Č����[�������܂����̂ŁA�Č���lj����܂��B
��R���j�@�ȉ��̍��ڂ��lj����܂��B
�@�@�|�@RAM �Ƀv���O������f�[�^��]�����ď�����������@
�@�@�@�@�@����������₷���Ƃ���Ƃ��A���ۂ̉��Z�������s���Ă̑��x��r�Ȃǃ��r���[���Ă݂����Ǝv���܂��B
����Ȋ����Ń��N�G�X�g����������ƁA�킽���Ƃ��Ă����ꂵ���ł��B�@�����̃|�C���g�����m�ɂȂ�܂��̂ŁB
���ƁA�Q�����悤���ǂ����悤�������Ă�����������A�P�Ȃ�������̏�Ƃ��������ŗ��Ă���������Ǝv���܂��B
�i�Q�O�O�V�N�T���T���j
������ƋC�����܂����B�@SEMB1200A �̊J�����ŁAsemb1200a-rom.ld �̋L�q��ς��Ȃ��� binutils-2.17 �� ld �Ń����N���̃A�h���X���Ԉ���Ă��܂��݂����ł��B�@�����ASEMB1200A �Ƀv���O������]�����Ă��A����Ƃ�����Ƃ�����Ȃ��ꍇ�A������Ƌ^���Ă݂Ă��������B
| �]�� | �C���� |
| .data 0x80020000 : AT ( _fdata ) { | . = 0x80020000 ; .data : AT ( _fdata ) { |
�����Ӗ����Ǝv���Ă����̂ł����A�}�b�v�t�@�C�����o�͂����Ă݂�ƁA.data, .bss �̈悪����Ă��܂��Ă���ꍇ�����邱�Ƃ��킩��܂����B�@�i�Č����Ȃ��ꍇ������̂ŁA������ƃR�����g�����Â炢�ł��j�B
(2007�N 5�� 9���j
�������Ċ��S�Ƀ_�E�����Ă��܂��܂����B�B�B�@���傱���Ƒ̒����߂��Ă����Ƃ���ŁA�u�K����̍쐬�ɁB�@���ݖ� 60 �y�[�W�B�@���ėǂ������Ǝv������̂Ɏd�グ�����B�@�����U���A���K�S�����炢�ł��傤���B�B�B�@SEMB1200A �ƍŋߔ������ꂽ�A�i���O�{�[�h������ł����̂ŁA�u�K���݂̑��o���\�肵�Ă܂��B�@���݁A���l�̕��ɉ��傢�������Ă���̂ł��傤�B�B�B
�i�Q�O�O�V�N�T���P�T���j
�u���l�̕����E�E�E�v�Ə������Ƃ���A�q�s����A��������܂����B�@���������P�O���ɍs�������Ȋ����ł��B�@����́A�C����������Ȃ���B�B�B�@�Ƃ͂������̂́A�����������ƂƁA�b�������Ȃ���Ǝv�����Ƃ̓Y����������̂ł��i�����g���F��ȃZ�~�i�[�ɎQ�����āA����͗ǂ������Ă��܂��j�B�@���Ȃ�A�܂���蒼���A�����邱�Ƃ͂ł���Ǝv���܂��̂ŁA���[���ɂ�郊�N�G�X�g�����҂����Ă���܂��B
�i�Q�O�O�V�N�T���P�T���G�ߌ�P�O�����E�NjL�j
�����͂����ƃ��{�b�g�ŗV�ԁB
SD-Card �ɓ��쎞�̃��O�𗎂Ƃ��Ĉ��肵�Ă��Ȃ��Ƃ��̕��s�ɂ��ă`�F�b�N�B
�i������ RT ����� SEMB1200A �̍u�K���\�����ݒ��ؓ��B�@���āA���l�ɂȂ����̂ł��傤�B�B�B�j
�����s�v�Z�������ĕ������Ă���Ƃ��A�s����ȕ��s������Ƃ�������̂ŁA�܂������B�@���O���痐�ꂽ�Ƃ����T�����Ƃ���A�������̐}�`�`�e�̂悤�ȏ�Ԃ��������B�@�s������s�́A�����ɂ�����͂ɋK�������łĂ��Ȃ��l�ł���i�}�`�j�B�@������ZMP�\��������Ă���̂ł��傤�B�@�܂��A�������ׂ������������炢�ł́A�d�ʃh���b�v�͑傫���Ȃ��B�@�����Č����A�T�[�{�ł̓d��������Ă���Ƃ��ɁA�o�b�e���[�̓d���������邪�A�o�b�e���[�̃p���[�����邽�߁A�d�ʍ����傫���Ȃ��Ă��邪�A�ق�Ƒ���덷���x�i�}�a�j�B�@�}�b�C�c�C�d�� 3D ���[�V�����Z���T�l�B�@�O���ɐi��ł��邾���Ȃ̂ɁA�W���C���y�����傫���U��Ă���B�@���������āA�w�C�x�C�y���̃C���[�W���i�����j���Ⴂ���Ă���̂��ȁH�@�܂��A�����x�����܂���肵�Ă��Ȃ��B�@�n���C�̓T�[�{���[�^�̉e�����Ă��Ȃ��l�q�ŁA��l�ɕω����Ă���B�@�����͂�������Ɣc���ł������B�@���̑��Z���T�l�Ƃ��āA�W���C���t�߂̉��x������Ă��邪�A��r�I���x�����肵�Ă���i�����Ɠ������Ă����̂ŁA���肵�����͋C�ɂȂ��Ă���̂ł��傤�j�B�@����ɒu�����b�c�r���g�ł��Ă��邪�A����͂b�c�r�̌Œ肪�s����Ȃ��߁A�u���u���k���Č������������Ƃ��ɉ������Ă�����̂Ǝv����B�@�o�c�r���r���ő傫���ς���Ă���̂́A��Q�������ꂽ���߂ł��傤�i���Ԃ�A�����̎�j�B
 |
 |
| �}�`�F�����Z���T���茋�� | �}�a�F�o�b�e���ƃT�[�{�����d���i�ƁA���̍����j |
 |
 |
| �}�b�F�W���C���i3���GX=���E��, Y=�O�㎲, Z=�������j | �}�c�F�����x�i3���GX=���E��, Y=�O�㎲, Z=�������j |
 |
 |
| �}�d�F�n���C�i3���GX=���E��, Y=�O�㎲, Z=�������j | �}�e�F���Z���T�iTEMP:�W���C���Z���T���x, CDS:������x, PDS:�O�������j |
�@��Ԃ̖��_�́A�o�Ă����f�[�^���A���[����Ȃ��傫�����ƁB�@�K���ȃ��O�f�[�^����̃v���O���������Ȃ��ƁA�d���������ł�����������Ȃ��B�B�B�@�Ƃ�����ASD-Card �� 1Gbyte �^�C�v�̂��̂����̂ŁA�]�T�������ăf�[�^�����͎c���Ă������B
(2007�N5��20��)
����A�Ƃ��Ă����܂����A�r�d�l�a�P�Q�O�O�`�u�K��q�s����B
�����̎d���Ƃ͈Ⴄ���ƁA������Ⴄ�Ƃ������Ƃ�����Ȃɔ��邱�ƂƂ́B�B�B
�܂��A�v��ʃA�N�V�f���g�ɂ������T�|�[�g�����܂����A�q�s�̃X�^�b�t�̊F�l�A�L��������܂����B
����̍u�K��́A�\����P���Ԕ������Ƃ����������ԂɂȂ�܂������A�������ł����ł��傤���H
���̒m���Ă���r�d�l�a�P�Q�O�O�`�̃e�N�j�b�N�͏o������Ȃ����ȁH�Ǝv���܂����A�����_�_�Ȃ̂��킩��Â炢���̂ɂȂ��Ă��Ȃ��������A������ƕs���ł����B
�Ƃ�����A�I�m�Ȏ��₪�r���r���ɓ����āA�����̃|�C���g���N���A�ɂȂ����̂́A�Q�����������X�̒g�����t�H���[�����Ă������Ǝv���܂��B
�Q���҂̊F�l�A�q�s�̊F�l�A�����͖{���ɂ����l�ł����B
�����ň�U��肪�ł������������Ă��܂��B�@�S�@��]�A�}�C���{�b�g�@JiGoRoHP
����ĂĂ������Ƃ������܂��B
�i�Q�O�O�V�N�T���Q�V���j
�_���������炵����������Ă��܂��ˁB�@�������ł��B�@�v���Ԃ�ɖڂ���ȏՌ��������܂����B�@�w��Ɉ��̓Z���T������A�����ł��ˁB
�H���d�q�ʏ��ŁA�Q�F�I�V���������B�@\39,800- �B�@����͔����ł��傤�i�ł����A�P��Ⴄ�̎����Ă邵�Ȃ��B�B�B�j
�i�Q�O�O�V�N�T���R�P���j
�܂����J���Ă��Ȃ����� SEMB1200A �� .wav �t�@�C�����Đ����ĉ���炷�\�[�X�ƃn�[�h���Љ�܂��B
�\�[�X�̉���͔����ɂ����R�R����_�E�����[�h���Ă��������B�@Windows���Ŏg���Ă��� .wav �t�@�C���� 0xBFE00000
�ɃA�b�v���[�h���ăv���O���������s���Ă��������B
���ƁA�n�[�h�ł����ALM386 ���g���W���I�Ȃ��̂ɂ��܂����B�@PWM���g���Ẳ����o�͂Ȃ̂ŁA�X�^�[�g�ƃX�g�b�v���Ƀf���[�e�B50%�ɗ����オ��u�ԂƁA������u�ԂɃu�`���Ɖ������܂����A�A���I�Ƀf���[�e�B50%�Ŕ��U���Â���悢�̂ŁA����͗ǂ��Ƃ��܂����B�@���\�ǂ����Ŗ�܂��B�@SEMB1200A �̏ꍇ�APWM��32ch ������̂ŁA�]���Ă���ꍇ�������Ǝv���܂��B�@ICS2 ���g���Ă���ꍇ�A24ch�����܂��Ă��邱�ƂɂȂ�܂��̂ŁAPWM���g�����A�C�e���𑝂�Ɨǂ��ł��傤�ˁB�@���́A�����g�Z���T�̔��M���Ƃ��Ďg���Ă݂܂��傤���˂��B
 |
�i�Q�O�O�V�N�U���P�R���j
�����PC�������オ��Ȃ��Ȃ����B�B�B WindowsXP �� SAFE ���[�h����ʖځB�@�Ƃ肠�����A��HDD�Ɋ��ꎮ�C���X�g�[��������A���Ƃ����Ƃ�HDD�̃f�[�^�͉��Ă��Ȃ������A�Ƃ������Ƃ܂ł͂킩��܂����B�@�������A���Ƃ��Ƃ��A�t�@�C�������b�N����Ă��܂��Ă����̂ŁA������ Cygwin �� chmod, chown ���s���ēǂ߂�悤�ɂ��āA�V����HDD���ֈڐA�����B�@���ꂩ��A�\�t�g�̍ăC���X�g�[���ƁA���[�����̊��ݒ肪�E�E�E�i�̂͊y�����������A���͋�ɂł����Ȃ��B�B�B�j�@�����̓��܂ŁA�܂��܂������肻���B�B�B
�i�Q�O�O�V�N�U���Q�S���j
�Ђ��т��ɍX�V�B�@�ƁA��������ŏ����n�߂����Ƃ��������̂ł����A�킯�����āA�X�g�b�v�B�@���ꂪ���x�������Ė{���Ɏ���܂����B
�߁X���������Ȃ��A�Ǝv���Ă���l�^�́A�A�A
�@�E�@JiGoRo �� V850ES/JG2 ���ڂ��ē���@�E�E�E�@����́A���N�ɂȂ�܂����^�G���Ɍf�ڂ��邽�߁A�L���������Ă��܂����i���e�����B�@��Ƃ̋C�����������킩��܂����j
�@�E�@JiGoRoHP �̕��s�X�s�[�h�A�b�v����@�E�E�E�@SEMB1200A �Ńf�o�b�O�p��SD-Card���Ȃ��ăf�[�^���K�[�ɂ��Ă����̂ł����A���ꂪ�������Ăb�o�t�����\�͂�����ł��܂����B
�@�E�@KRS-4014HV �Ƀ��^���M�A�Z�b�g�R�i4013�p�j������� 4013HV �ɐ��܂�ς��܂����B�@�g���N��葬�x�d���̊߂�ύX�B
�@�E�@SEMB1200A �̊J������ Eclipse �ɁB�@�悤�₭�AEclipse �̐ݒ���@�̗����̓�����ɂ��������ł��B�@�~�߂Ă��� gdb-stub ������Ă݂����Ȃ��Ă��܂����i���{�b�g���痣��Ă����E�E�E�j
�@�E�@SEMB1200A �� HOS-v4 �̓����B�@�J�������o�[�ɉ����Ă��������܂����B�@HOS-v4 1.02 ���x�[�X�ɃS�\�S�\����Ă��܂��B
�@�E�@�֓����{�b�g���K��ɍs���������A�R��A�����ēs�������Ȃ��B�@�P�Q���A�����ڂ���ԂŖY�N����Q�����悤���Ȃ��B�B�B
�i�Q�O�O�V�N�P�P���P�U���j
�i���L�^�i�j�B�@�̂͂ǂ����ăR�c�R�c�������̂��s�v�c�ł��B�@���́A�R�c�R�c����Ƃ͐i��ł��܂����A�v�����X�V���Ƃ܂��Ă��܂��Ă��܂��B
�@�E�@�^���̎��M���I���A�P��ڂ̋L�����d�オ���Ă��܂����B�@�������G���Ђ̗́I�Ƃ����Ƃ���ŁA���炵�����ꂢ�Ɏd�オ���Ă��܂����B
�@�@�@�R�C�S����x�̘A�ڂɂȂ肻���A�Ƃ������Ƃł����A�ǂݖO�������ȋC�����Ă��܂��̂ŁA�R���\���ł��������|�A�A���B
�@�@�@�P��ڂ̓��{�b�g�̍\���A�Ƃ������ƂŁA�ŋ߂̃��{�b�g�L�b�g�ł́A�ʂ�߂��Ă��܂��Ƃ���������Ă݂܂����B
�@�@�@�Q��ڂ́A�Z���T�[�n�B�@�R��ڂ́A���s�A���S���Y�������Ȃ�ɉ��߂��ăv���O���~���O�A�Ƃ��������ɂȂ�Ǝv���܂��B
�@�@�@���X�Ō���������A�F����A�����Ă��������ˁ`�I
�@�E�@KRS-4014HV�̃��^���M�A�������B�@���炵�����s���x���A�b�v���܂����B�@SD-CARD�̏������݂��s��Ȃ��悤�ɂ��Ă݂��Ƃ���A�����Ƃ����ԂɂP�����炢�͕����Ă��܂��܂��B�@�ŋ߂�ROBO-ONE�Ȃǂ�DVD�ȂǂŌ��Ă�����s���������R�����܂���Ȃ���A�킩��܂����B�@���炵���T�[�{�����肪�Ƃ��I�@���@�ߓ��Ȋw�i���j����
�@�E�@�P�Q���̗��K��A�P���̂�ف[�A�Q���������Ȃ��B�B�B
�i�Q�O�O�V�N�P�Q���V���j
���S�Ȏ����ڂ��̂܂܂P�T�ԃ��V���g��DC�ɂĉ߂����B�@IEDM(International Electron Devices Meeting) �̒��u�ɍs���Ă����B�@�܂��܂������̂͐i�������������B
�����R���̍ہA�W��̐l���P���������炸�A�܂��A�S�w�̎w����Ƃ�Ƃ������ƂŁA��a�B�@���ǂQ���ԑ҂����ꂽ��A�č��s���̖���J������A��C�ɏa�؉����B�@�Ƃ��Ă�����o�����ł����B
�A���Ă�����A�����ڂ������邩�ȁH�Ǝv������A�܂��܂��{�P�Ă���B�@�P�ɖ����������H�@��ѓ���Ŋ֓����K���Y�N��ɍs�����Ǝv���܂������A�f�O�B�@�����́E�E�E�B
 |
 |
 |
 |
 |
 |
���������X�i�b�v�ʐ^���B�@���������Ɗό��ɍs�����̂��H�ƌ���ꂻ���ł����E�E�E�B�@�����Ȃ��o�}������n�܂�AUnited Stetes Capital, Smithsonian, ... �ƒ�Ԃ��܂��܂����B�@$35 �̃��u�X�^�[���H�ׂ܂������A��͂�傫���̂͐H�ׂ�����������܂��ˁB�@�N���X�}�X�O�Ƃ������ƂŁA�����炶�イ�Ƀc���[�������Ă��܂����i����́ADulles International Airport ���j�B
�i�Q�O�O�V�N�P�Q���P�U���j
�����[�N���X�}�X�I
�����ߑO�X������́A��ف[�S�̑��\�����ݓ��B�@�����G���g���[���I���܂����B�@���Ƃ́A�����ƃ��{�b�g��������̂݁i�̂͂��j�B
���ɔ����āACPU�{�[�h�̌Œ蕔�i����苭�łȂ��̂ɕς��悤�ƁA�v���Ԃ�ɃA���~���H���܂����B�@6mm���̃A���~�_�Ƀ^�b�v����āA�H��܂�Ȃ��悤�ɐT�d�ɂ���Ă����̂ł����A���s�B�@��C�ɂ��C���Ȃ��Ȃ�܂����i�j�B�@�C����蒼���āA�z�������ł��X�b�L�������悤�Ƃ������ƂŁA�ĊJ�B
�i�Q�O�O�V�N�P�Q���Q�S���j
�����܂��āA���߂łƂ��������܂��B�@�{�N����낵�����肢���܂��B
�N�͂��߂Ƃ������ƂŁA��N��U��Ԃ邱�ƂƁA���N�̗\��������Ă݂����Ǝv���܂��B
�i��N��U��Ԃ��Ă݂�Ɓj
�E�@����������悤�ȋC�����邪�A�v�����X�V�����Ȃ��B
�E�@�d�����ۂ����Ƃ����������A�Ƃ�����ۂ��c��P�N�B
�E�@���ʓI�ɁA�����炵���������Ă��܂����H
�i���N�̗\��j
�E�@Web �̍X�V�x���グ��i�j�B
�E�@��ف[�S�AROBO-ONE �ɎQ������B�@�Q�����邾���ł���ςȂ͂��B�@���I�ɂ͍����ڕW�i�j�B�@�P�P�̐ςݏd�˂�����������B
�E�@���{�b�g���ȊO�́A���̂��Ƃɍi���čL���Ȃ��B�@�Ƃ��� SEMB1200A �ւ̎��g�݁B
�@�@- HOS-v4 ����
�@�@- gnu-stub �̎���
�Ⴂ�����ɂ����ł��Ȃ����Ƃ�����ƁA���Â������閈���B�@����Ɨ����ɁA���炾�炵�������𑗂��Ă��܂��A�����B
�����̕��X�Ɏh����������2006�N�A�����ɊÂ��Ă��܂���2007�N�A2008�N�͔��̂P�N�ɂ������ł��ˁB
�i�Q�O�O�W�N�P���P���j
�\��ʂ�i�܂Ȃ����A���{�b�g�L�������͂����ƍڂ��ďo�ł���܂����B
CQ�o�ł�Interface���ɂ��ꂩ��R��ɂ킯�Čf�ڂ���܂��̂ŁA���X�ȂǂɊ�邱�Ƃ�����܂������ɂƂ��Ă݂Ă��������� (p.131-140)�B

�@��P��́A���{�b�g�̐���L���Ƃu�W�T�O�^�C�}���g�����o�v�l�o�́A��Q��̓Z���T�A�R���g���[���ڑ��ƁA�t�^���w�ɂ��ƂÂ��v�Z�Ɛ���A��R�A���s�v�Z�i�����s�j�Ƃ����������ł��B�@�ȒP�ɂ����AJiGoRo�̃{�f�B��������V850ES/JG2�}�C�R���Ő��䂵�Ă݂܂����A�Ƃ����Ƃ���ł��B
JiGoRoHP �̕����A�����t���[���lj������ʐM�@����ɂ��肢���č쐬���Ă����������Ƃɂ��܂����B�@�����Z���T�i�e�S�_�j�ُ̈�_�������߁A�����ɔ��P���lj����Ă����̂ł����A������A���~�Ɍ����\��B�@����܂Ńv���P�D�T�����Łi�������Ⴍ���āj����Ă����̂ł����A�Z���T�̓ˋN���v���̒e�͐��̂��߁A�ɂ߂荞��ł����悤�ŁA���������l���łĂ��Ȃ����������Ă��܂����B�@���̂�����̔�r�̓t���[���������Ƃ���ŏЉ�����Ǝv���܂��B
�i�Q�O�O�W�N�P���Q�U���j
���̂܂ɂ��P�����o���Ă��܂��܂����B�@�挎�ɂЂ��Â��AInterface 4������V850ES/JG2���g�������{�b�g�ɂ��Ă̋L���f�ځB�@�����^���W���C���̃O���t�͕Е����o���c�L���Ȃ��悤�Ɍ����܂����A����͂���܂��B

�ŋ߁AKRS-401x �̃V���A���ʐM�l�^��ǂ��������܂��̂ŁA���̌o���k���Љ�Ă����܂��B�@���Q�l�܂ŁB
�E�@�p�x����ɕK�v�Ȏ��Ԃ�0.6msec.���x�ł����A����PID���䂪���邽�߁A4msec.�i����������ƒ��������ǂ������j�ȏ�Ɏ�����ݒ肵�������u���u�����Ȃ��B
�E�@�X�g���b�`����A�X�s�[�h����R�}���h�𑗂�ƁAPID����ɑ����f����邽�߁A��L���������Z�����Őݒ肷��ƁA�u���u������B
--> JiGoRoHP �ł́A�ȉ��̂悤�ɂ��Ă��܂��B
�@�E�@�S�̃T�[�{���f�[�W�[�`�F�[���ڑ�
�@�E�@�P������̐�������́A12msec. �Ƃ���B
�@�E�@�X�g���b�`�A�X�s�[�h�R�}���h�𑗂�ꍇ�́A�����1/3�̎��ԂŕύX���̂ݑ��M������B
���ׂ���������ԂŃu���u������ȁA�Ǝv������A���������傫���Ƃ��Ă݂܂��傤�A�Ƃ����̂����_�ł��B
�i�Q�O�O�W�N�Q���Q�X���j
�C�����ƁA����ɂP�����B�@�������A���낢��ƃ`�������W���Ă��܂����iROBO-ONE�ւ̃`�������W�͂ǂ������H�́A�����Ă����āE�E�E�j�B
��X���A�挎�ɂÂ��AInterface 5�����Ƀ��{�b�g�L���f�ځB�@����łR�A�ڏI���ł��B�@�������A�������ɂ���i���P�f�ڂ���܂��B�@���b�ł����A�����̋L���͍ޗ����肩�猴�e�����グ�܂łR�T�Ԃł����B�@�����͎d��������̂ŋx�������Ŏd�グ��A�Ƃ������U�����̂ŁA�o���オ�������̂��v�A�Ȃ̂͊ȕւ��Ă��������B�B�B�@�Ƃ������ƂŁA���e�܂߂Ď��������y���݂ɁB
�u�W�T�O���{�̌�҂ł́A�p�ӂ��Ă������s�̎ʐ^���f�ڌ�����ɂȂ�܂����B�@���������̎ʐ^�ɂ���悩�������Ȃ��B�B�B�A�ڋL�����������Ă��������āA���߂āA�������̂ł����A�P������y�����A��J�A�ƌ������̂͂���̂ł����A�����Ȃ�ɔ[�����Ď��ɐi�ށA�Ƃ����Z�p���݂����Ȃ��̖̂������͂��܂�܂���ˁB�@�����Ȃ���A���{�b�g������n�߂����̋�J���v���o���܂����B�@�ǂ��o���������Ē������Ǝv���܂��B�@ROBO-ONE�ɏo��A�Ƃ����ڕW���f���āA�\�I���i�R�����瓞�B���Ă��Ȃ������Ɏ����䂳�������Ă��܂������A�Ȃ������Ȃ�̖ڕW�݂����Ȃ��̂R�Ƃł����A�����Ă����C�����܂��B
�R�A�ڂ��I�����Ō�ɁA�F�l�Ɋ��ӂł��B�@���������܂ŁA�i�T������.�Q�O�O�Ɍf�ڂ���Ă��܂��j�ǎ҃A���P�[�g�́u�R�����ŋ������������L���v�̂P�ʂɁu�u850���{�v���I��܂����B�@���肪�Ƃ��������܂����B
�i�Q�O�O�W�N�R���Q�X���j
���������܂ŁAInterface �̃��{�b�g�L�����O�҂ɑ����Ē��҂��ǎ҃A���P�[�g�u�S�����ŋ������������L���v�̂P�ʂɂȂ�܂����iInterface��'08/4/7�u���O���j�B�@�A�e�B���ł��B�@�������������X�A���肪�Ƃ��������܂����I
���ƁA�{���A�V�����p�\�R�����䂪�Ƃɂ���Ă��܂����B�@�s���C���������p�\�R����u�������ł��B�@�������A�����Ȃ�AWindows���v���C���X�g�[���łȂ̂ɗ����オ��Ȃ��B�B�B
�p�\�R���X�y�b�N�FIntel Core2Quad 2.5GHz, 4GB-800DDR2, M/B P5E, G/B 8800GTS,
HDD 500GB�B�@���炵���B�@����ŁA���K�ɂȂ��Ă����Ηǂ��̂ł����B
�i�Q�O�O�W�N�S���X���j
PCM������SEMB1200A�ōs����A�Ƃ����̂��ȑO�iJune/13/'07) �ɏ����܂������A����AADPCM�ɒ��킵�Ă݂܂����B�@���ʁA������炵�Ă���Ԃ́A����Ȃ��ȁH���炢�܂ł͂ł����̂ł����A�I���̂Ƃ���ŁA�s���Ƃ��������ȉ����o�Ă��܂��܂��B�@�ǂ������������̂ł��傤�B�B�BPCM�̏ꍇ�͖�肪�Ȃ��̂ł����B�B�BSEMB1200A�ɂ͑����̂q�n�l������̂ŁAPCM�̂܂܂ł��������Ȃ��B�B�B
���ƁA���{�b�g�ʼn���������Ă�����A�ǂ�ȃX�s�[�J�[���g���Ă���̂ł��傤�H�@�����̂��̂ł��傤���˂��B�B�B�����̂ӂ��̃X�s�[�J�[�̕������ꂢ�ȉ������Ă���̂ł����A�T�[�{�̑��Ɏ���u������A�d�q�R���p�X�i���ʎ��j��������Ă��܂��̂ŁA�Y�݂ǂ���ł��B�@�d�q�u�U�[�ł��ꂢ�ȉ����o���Ă��鎖�Ⴊ�m�肽���A�Ǝv���������̍��ł��B
�i�Q�O�O�W�N�S���Q�O���j