 |
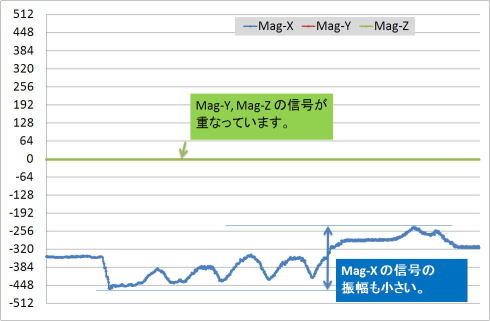
| �@�E�@Mag-X �̓��{�b�g�̑O������̎� �@�E�@Mag-Y, Mag-Z �̓��{�b�g�̍��E�A�㉺�����̎� �@�E�@�����͎��Ԃɑ������܂����A�K���ɓ����������̓���Ȃ̂ňӖ��Ȃ� �@�E�@Mag-X �͐U�����������AMag-Y �� Mag-Z �͖����� |
256(JiGoRo)-Series ���L (3) �@
SEMB1200A �̃y�[�W��K�X�X�V���ł��B
�S�[���f���E�B�[�N�Ȃ̂ŁA�����������邩�ȁH�Ƃ������ƂŁA�v�������V�K�y�[�W��p�ӂ��Đ���l�^�������Ă݂悤�Ǝv���܂��B�@����́A�d�q�R���p�X�B�@���܂ŁA���p���Ă��Ȃ������̂ŁA���ڂɍۂ��ĕs����C�����܂���ł����i�l���Ă݂�Γ�����O�ł����B�B�B�j�B
�u�d�q�R���p�X���T�[�{���[�^�̑�������Ĕz�u���邱�Ɓv
JiGoRoHP �̏ꍇ�A������3D���[�V�����Z���T��z�u���Ă��܂��B�@�����ɓ��ڂ���Ă���d�q�R���p�X�́AX,Y,Z�̂R���ɑ��Ėk�̕��p�������ƐM���������Ȃ�d�l�ł��B�@�������A���̂� Y,Z �̂Q���̐M�����U��܂���B�@���������Ȃ��A�Ǝv�����ׂ܂����i���߂͉�ꂽ�̂��Ǝv���A���Ȃ�u���[����܂������B�B�B�j�B
|
| �@�E�@Mag-X �̓��{�b�g�̑O������̎� �@�E�@Mag-Y, Mag-Z �̓��{�b�g�̍��E�A�㉺�����̎� �@�E�@�����͎��Ԃɑ������܂����A�K���ɓ����������̓���Ȃ̂ňӖ��Ȃ� �@�E�@Mag-X �͐U�����������AMag-Y �� Mag-Z �͖����� |
���{�b�g�̃{�f�B�i�����j������O���Z���T�̓���`�F�b�N�������Ƃ���A���Ȃ��Z���T�l�邱�Ƃ��ł����̂ŁA�̏�ł͂Ȃ����Ƃ��m�F�B
�����ɁA�Z���T�����{�b�g�ɋ߂Â��Ă����ƁA�T�[�{�̑��ɋߕt���Ǝ��C�Z���T�������������݂��Ȃ�A�u���A�������B�@���C�̖��ˁv�Ƃ����ŋC���t���B
�T�[�{�𑽗l���Ă��郍�{�b�g�̏ꍇ�A���C�Z���T�͔z�u�ӏ������ɖ��ɂȂ�܂��B�@������O�̂��Ƃł����A�o���Ă����܂��傤�B
�\�Ȍ���T�[�{���狗����u���Ĕz�u���āA�ēx�m�F�B�@������A���m�Ɏ��Ԃ𑪂�����A��������X�s�[�h�ōs���Ă��Ȃ��̂ŁA�����͓K���B
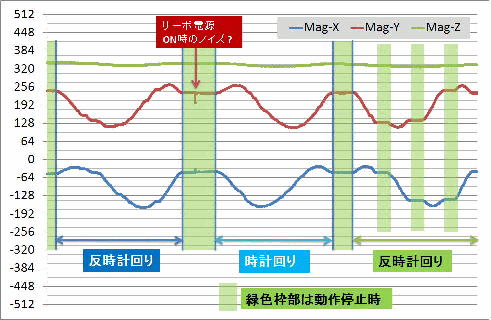 |
| �@�E�@����`�͏�O���t�Ɠ����B �@�E�@Mag-Z �������ɔg�ł��Ă���B�@���{�b�g�̐����u�����Ă��Ȃ������ׁB �@�E�@���Ɋ��x�ǂ������Ă���i�T�[�{�d�� ON ���̃m�C�Y�܂ŏ���Ă���) �@�E�@�T�[�{�ʓd�Ɋւ�炸�U���͓����B |
�悵�悵�A����łP���O�i�B�@ROBO-ONE �Q���҂��u�����O�ɂ͖���������v�ƁA�R�����g����Ă܂����A�����Ǝ��C�Z���T�����̃��{�b�g�ƌ�킷��ƊO���������ُ�l���o���낤�Ȃ��B
| �i�v�X�A������Ɨ]�k�j Windows�}�V�[����V�������K�ȃR���s���[�e�B���O�����Ă��܂������A�v��ʗ��Ƃ���������܂����B Web�`�F�b�N�����������L�����o�Ă��܂����AOffice2007 ���x���I ���ɁA�O���t�ŋK�菑������ύX�����ۂɁA�ɒ[�ɒx���Ȃ�B ���쐫�͊����Ηǂ��b�����A�傫�ȃt�@�C����������㏞�͂ƂĂ��Ȃ��傫���B�@ |
�i�Q�O�O�W�N�S���R�O���j
�����͉摜��荞�݁B�@���ݎs�̂���Ă��܂��A10M��f��DMR-C1���g���āA�摜��荞�݂��s���܂����B
Treva �Ɠ��� CLK �� DATA �݂̂̃V���v���ȃC���^�[�t�F�C�X�̂��߁A�v���O���~���O�͗e�ՂȂ̂ŏd�Ă��܂��B
�i�G���[���̕��A�̂����������m�肽���Ƃ���ł��j
2004�N10��24���ȍ~�ɏ����͂��߂܂������A�ǂ��ŐG�ꂽ���Y�ꂽ�i�T������Ȃ������̂Łj���K�ł��B
DMR-C1��(Treva��)�ACLK�����^�̃V���A���E�C���^�[�t�F�C�X�ƌ����܂��B�@�܂�ACSI(SPI)�ł��B
SEMB1200A �ł��ASH-2�ł��AV850�ł��A������Ă���V���A���E�C���^�[�t�F�C�X�Ȃ̂ŁACLK�� H/L �ɐ�ւ��āA�^�C�~���O�����킹��DATA��ǂނƂ���������n�[�h�E�F�A�ŏ��������邱�Ƃ��ł��܂��B�@�����Ńn�[�h�E�F�A�ɔC����Ƃ��āACLK �͂ǂ̒��x�܂ō����ɂł���̂ł��傤���H�@�܂��A�R�R�ł������܂������ACSI(SPI) �@��𑀍삷��ꍇ�A�o�C�g�f�[�^�Ԃ̃E�F�C�g���d�v�ɂȂ�܂��B�@����́A�n�[�h�E�F�A��CSI(SPI)����������ꍇ�ł��A�f�[�^�̂Ȃ��Ɋւ��ẮA���̃f�[�^��ݒ肷��Ƃ����A�N�V���������M�@���̃}�C�R���̃X�s�[�h�i�A���S���Y����FIFO�̗L���Ȃǂ̃n�[�h�E�F�A�j�Ɉˑ����邩��ł��B
���낢��ƃe�X�g���Ă݂����ʂł����ADMR-C1 �̏ꍇ�ACLK �� 8MHz �ł����Ă��ǂ����Ƃ��킩��܂����B�@�܂��A�����ɑ��肵�Ă��܂��A�o�C�g�f�[�^�Ԃ̑҂����Ԃ����ɏ������ł���悤�ŁA600MHz
����̏�ԂŁA
uint8 data[352*288*2];
*(volatile uint16 *)CSI_SOTBREG = 0x00FF; // �P�ڂ̃f�[�^���M�w��
for( xy = 0; xy < 352*288*2; xy++ ) {
uint8 c;
while( ( *(volatile uint16 *)CSI_CNTREG & CSI_CNTREG_SIRB_V ) == 0 ) ;
data[xy] = *(volatile uint16 *)CSI_SIRBREG; // �f�[�^�ǂݍ���
*(volatile uint16 *)CSI_SOTBREG = 0x00FF; // ���̃f�[�^���M�w��
} |
�Ƃ����f�[�^����M���s���܂������A��肱�ڂ��͂قǂ�ǖ����悤�ł��B�@�قƂ�ǁA�Ƃ����̂́A���܂Ƀ����_���ɂP�������f�[�^�i0xFF�j��Ԃ��Ă��Ă��܂����Ƃ�����܂����B�@�����݂Ȃǂ̉e����������܂���B
�ȒP�Ƀv���O�����̐��������Ă����܂��ƁAdata[] �́ADMR-C1 ����̉摜���B�@��f�� 352 x 288 �ŁA2�o�C�g�łP��f�\���ł��B�@��f�����J��Ԃ������������Ȃ��킯�ł����A�f�[�^���M�w���Ƃ��āA0xFF �𑗂��Ă��܂����A�l�͉��ł��悢�ł��B�@CSI �̏o�͒[�q�� DMR-C1 �ɐڑ����Ă��Ȃ����߁A�Ӗ��͂Ȃ��ACLK �� 8bit ���o�����Ƃ������ړI�ł��B�@while() ��CSI�̏�Ԃ��`�F�b�N���A8bit����CLK�𑗂�f�[�^����M���I�������̊m�F�����Ă��܂��B�@UX1200E �̏ꍇ�ACSI��16�r�b�g�f�[�^�Ƃ��Ď�舵�����߁Auint16���ڗ����܂����ACSI�̏����ݒ��CSI�f�[�^��8bit�Ƃ��Ď�舵���l���������ɂĎw�肷�邱�ƂŁACLK��8bit���ł�������~�܂邱�ƂɂȂ�܂��B
�J��Ԃ������A�f�[�^�̎�荞�݂Ȃǂ���܂��̂ŁA���ۂɂ́A0.03�`0.1�b���x�͂P�摜��荞�݂Ɏ��Ԃ�v���Ă���悤�ł��B�@���{�b�g�������Ȃ����荞�ނɂ́A�܂��܂����Ԃ���������Ƃ���ł����A�L�����L����������݂āA�l���ē����A�Ƃ������x�̂��̂ł���Ύ��g�p��͑��v��������܂���B
�ł����A����ς�~�����ĐM��������R���i�C���[�W�Z���T�j���~�����Ȃ��Ă���̂ł����B�@�Z���T�̃R�l�N�^�ʒu����ӂ̒����ł���Α������Ȃ̂ł����B�B�Brev.2 �Ƃ���悳��܂��˂��B�B�B�i���ƁA�����P�܂���T�C�Y���������j
�i�Q�O�O�W�N�T���P���j
�Q�C�R�������x�ɋL�^�������Ă����܂��B
�@�@SEMB1200A �ł̏������Ԃ̌v������
�@�^���v�Z�� 600MHz ����ōs���ƁAexp() �Ȃǂ�������g�����v�Z���@�ł��A���̑��p�x�v�Z�́A50usec.����Ώ\���ɂ��肪���鑬���ŏI���Ă��܂��B�@���݁AKRS-401x
���P��UART�ɑ��ĂS���A�����Z���T������UART�f�[�W�[�`�F�[����ɏ悹�Ă��邽�߁A�V���A���ʐM��5���s���Ă��܂��B�@�T���̐ݒ������12msec.�Ƃ��Ă���̂ŁA����
12msec - 50usec = 11.950msec ���̎��Ԃʂɑ҂����Ă��邱�ƂɂȂ�܂��B�@���ꂵ���Y�݂ł��ˁB�@�����ŁA�Z���T�t�B�[�h�o�b�N�v�Z��A���s�Ƃ͕ʂ̓���i�r�̓���Ȃǁj�A�摜������A������ׂ�̂��߂�ADPCM�����ȂǁA�ӂ�Ɏ��Ԃ��g����v�Z�ɂȂ�܂��B
�A�@�����s�v�Z���y������ɂ�
�@Interface���ɂ͎��ʂ̓s���㏑���܂���ł������A�����s�v�Z���d���Ɗ�����CPU�̏ꍇ�A���̕��@�Ōy�����ē����s�v�Z�œ��������Ƃ��ł��܂��B�@�T�[�{�ݒ�������̊p�x�v�Z�̂��߂�exp()�Ȃǂ̊����g��Ȃ��ŁA�A���Đ�����Ɠ����A��Ԃ����߂�������i�p�x�j�����������Ɠ����s�v�Z�ɂ�苁�߂āA���̊Ԃ̃T�[�{�������̊p�x�v�Z�́A���}�⊮���R�����S���A�����Ă��T�����Ńt�B�b�e�B���O����Ό��\�y���āA���A�I�m�Ɍv�Z�ł��܂��B�@�����s�͒��ҁA��Ԍv�Z�͌�҂ɂ���܂��̂ŁA�g�ݍ��킹�Ďg���Ă݂Ă��������B�@�Q�l�܂łɁAV850ES/JG2 20MHz�̏ꍇ�́A�T�[�{��������łP�����s���Z���I���Ă��܂����B�i�������A���W�X�^���̐ݒ��float�^���Z�Ƃ��������݂��Ă��܂��j�B
�B�@�������������N
�@���܂˂������L�A����Anisiken2002�̓��L�Ō����Ă����������r�������N�i�ʐ^�lj��A���肪�Ƃ��������܂����j�B�@�m���Ɋp�x����͈͂͋����Ȃ�f�����b�g�͂���܂����A���s�����R���p�N�g�ɍ���ł͔��ɗǂ��ł��ˁB�@�X�i����̂Ƃ����Ŕq�����Ă��āA�u������H�@������H�@������H�v�̂܂܁A�����܂��d�����Ă��܂������A�������肵�܂����B�@���^���{�b�g�ŁA���ɑ�������������肽���ꍇ�́A���ɏ������ł��ėǂ��ł��ˁB�@�i�������A����̓w�r�[���H�B�B�B�@�T�[�{�̑�l�����ɂ��Ă�����l�����������c���H�B�B�B�j
�C�@���`����ς�u��Łv���{�b�g����Ă�i�d�q�H�쁕�v���O���~���O�j�̂��y����
�@�ȏ�A�⑫�����Ȃ��B
�i�Q�O�O�W�N�T���Q���j
�Ƒ��T�[�r�X�p�����B�@�{���A�J�オ��̍����R�ցB�@���P�P�j�J�オ��̂U���R�[�X�͂�߂�B�@���P�Q�j�����R�A�P�[�u���J�[���g��Ȃ��ꍇ�A�Ȃ߂Ă͂����Ȃ��i���ɉ^���s���ȏꍇ�j�B
�i�Q�O�O�W�N�T���S���j
����
�@�E�@P�h�b�g�R���ɔ�������ꍇ�A�u�J�b�g�w������čH�v����Έ����d�オ��B
�@�E�@P�h�b�g�R���̃��[�U�[�T�|�[�g�͓d�b���D���B�@���[���͋��݂����B�@�d�����ł��K���K���d�b����B
�@�E�@P�h�b�g�R���̎����́A��R��R���f���T���^�_�Ŏ�ɓ���B�@���O�ɒ��ׂĐv����Ƃ悢�B
�@�E�@�o�Ńh�b�g�R���̎����́A��������s���ꍇ�͍����B�@�ǂ��������Ƃ���͂Ȃ����̂��낤���B�B�B�i��͂��Б���łȂ��Ə������Ă��炦�Ȃ��̂��낤���B�B�B�j
��`���Ă������͂��Ă��炦�Ȃ����낤�Ȃ��B�B�B
�悤�₭�~�J���n�܂��������ł��ˁB
�s�������� Eagle ���[�N�͂�����Ɠ��L����폜���܂����i�����ꐢ�ɏo���܂��j�AJiGoRoHP�l�^�������܂��B
SEMB1200A��HOSv4.0 ��A�n����ɂ��ڐA����Ă��܂������A���̂��сAFPU���^�X�N���Ɏg���Ă����Ȃ��悤�ɏ��������Ă݂܂����B�@Sourceforge �̎g�������킩��Ȃ��̂Œ��ɃA�b�v���[�h�ł��܂��A�f�o�b�O���Ă��`���Ă�����������A���������[�����ł����肵�܂��̂ŁA�A�����������B
JiGoRoHP �̈ꕔ�t���[�������ʐM�@�����ɉ��H���A���}�C�g�������s���Ă��������܂����B�@��̕s���n���x�Ȃ��Ȃ��O�㍶�E�A�����]���܂łł���悤�ɂȂ�܂����B�@���Ƃ́A�@����Ă���̍⓹�ł�������悤�Ƀ`���[�j���O���Ă������Ǝv���܂��B
�c�O�Ȃ��ƂɁA���X�̃C�x���g������̂ł����A���Ƃ��Ƃ��d���◷�s�v��Ɉ����������Ă��܂��Ă��ĎQ�����ł��Ȃ����݂����������Ă��܂����A�܂��܂����{�b�g���͂�߂܂���B�@�w�r�[���̃��{�b�g�͉����t���Ă����Ȃ��̂Œf�O���Ȃ��B�B�B
�i�Q�O�O�W�N�U���Q�P���j
HOSv4.0 �̃p�b�`�� sourceforge �ɃA�b�v���[�h���Ă݂܂����B�@�J���҂̂�����̂��ȁH�@���ƕs���B�B�B
�s���Ȃ܂܂ł͂����Ȃ��̂ŁA�A�n����ɂ��肢���� CVS �X�V���Ă��������܂����B�@���肪�Ƃ��������܂��B
���́A��O�������L�q���Ă����܂��B�@���Ȃ��Ƃ��ASEMB1200A�Ŋg�����ꂽ PWM,
UART3 �ƁAUX1200E �� UART1, 2, CSI �͋L�q���Ă������Ǝv���܂��B
�i�Q�O�O�W�N�U���Q�Q���j
Interface 6�����Ɍf�ڂ��ꂽ�u�]���傱���g���[�j���O�v�ł����A�F�l�̂������ŁA�ǎ҂̐l�C�L���A���P�[�g�̂P�ʂ��܂����B�@���肪�Ƃ��������܂����B
V850 ���{�b�g�L���ł̂P�ʁA�P�ʁA�R�ʁA�ɂÂ��āA�P�ʂ����������܂������ƁA��ς��ꂵ���v���܂��B�@���N�O�͑f�l�������̂ɁA�L�����������Ă��������@���^���Ă��������܂������ƁA�����������Ă��������܂����ǎ҂̊F�l�ɂ���\���グ�܂��B�@���肪�Ƃ��������܂����B
�i�Q�O�O�W�N�U���Q�U���j
����ONO�̓d�]�ǐV�����肪�Ƃ��������܂��B�@���{�b�g�̃l�^�������Ȃ���A�Ǝv�����A�����������Ă��܂��Ă��钆�A�v�X�ɏ�������ł��E���Ă���������̂́A�Ƃ��Ă���݂ɂȂ�܂��B
HOSv4 �� SEMB1200A �ւ̈ڐA�ł��B�@FPU����͑��v�����Ȃ̂ŁA�����ė�O�����i�����݁j�ɂ��ĊJ�n���܂����B�@MIPS ��CPU�Ȃ̂ŁA�����ݖ��Ƀx�N�^����`����Ă��Ȃ��̂ŁA�����݃t���O���P���m�F���āA�x�N�^��`�ƃx�N�^�A�h���X�ɕ���̂��Ђ����珑����ƂɂȂ�܂������A�Ȃ�Ƃ��ł������Ȋ��������Ă��܂����B�@���Ƃ́A�ǂ̂悤��HOSv4�̍�@�ɂ��킹�ĕ\�����邩�A�������Ǝv���܂��B
SEMB1200A �Ŋg������Ă��� FPGA �� PWM, UART3 ����`���Ă����܂����̂ŁA�����݃x�N�^�ɏ���������������ʏ�̊��Ɠ������o�ŏ����Ă����Ηǂ������ɂȂ��Ă��܂��B
�킩��Ȃ��Ƃ���́A�����݂͂ǂ̃^�X�N�������Ă���Ƃ��ɐ����邩���ۏႳ��Ă��Ȃ��̂ŁA�X�^�b�N�����ӂꂽ�肵�Ȃ��̂��Ȃ��B�B�B�Ƃ������Ƃł��ˁB�@�����ݖ��ɃX�^�b�N����������̂��ȁH�H�@HOS
�̊J�������o�[�ƈꏏ�ɂ��̂�����͉������Ă������Ƃ������܂��̂ŁA���炭���҂����������B�B�B�@�e�X�g���͂������������������Ⴂ�܂�����A�A�����������B
�i�Q�O�O�W�N�U���Q�W���j
HOSv4 �̗�O�����ɂ��Ď�ύX�B
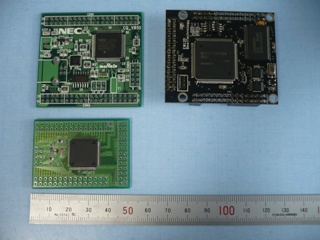 |
�Q�T�ԂقǑO�ɐ����˗��������̂��͂��܂����B�@�傫����r�̂��߁A�R���ׂĂ���܂����A����������̐������B�@����� Interface���t�^��A�E���CPU�̃N���X�Ƃ��Ă͓������炢�̃x�X�e�N�����SH2/7145F �{�[�h�i��FLASH-ROM���ڂ��Ă��̃T�C�Y�Ȃ̂ŁA�������Ǝv���܂��j�B�@QFP 100pin �̕K�v�Ȃ��̂��o�������� 2.54mm�s�b�`�̃s���z�u�Ŗʐς�����Ă��܂��̂ŁA�s���w�b�_�E�t���[�����g�����Ƃ�O��Ƃ���Ƃ��ꂪ�M���M���̃T�C�Y�ł��傤�B�@���Ƃ́A�����̂��B�B�B�i���đ��v���H�j�@
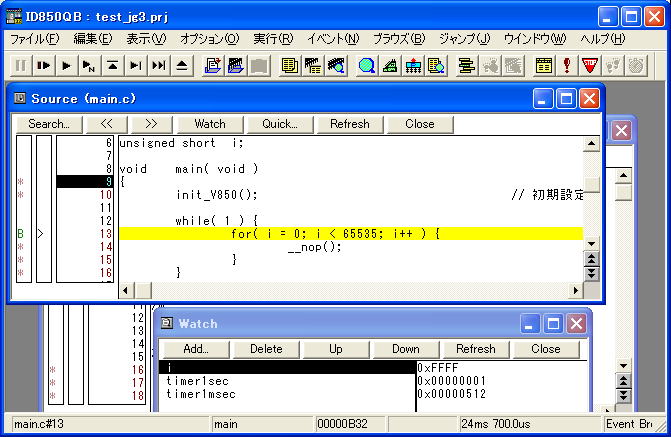 |
�Ƃ������ƂŁA�������܂����B�@�����A�P���œ�����m�F�ł��܂����B�@�����CPU�͊O���N���b�N4MHz �œ��� 32MHz �œ��삷����́B�@�悵�悵�B
�i�Q�O�O�W�N�V���T���j
�悤�₭�ł������ȁH�@HOSv4 �̗�O�����ƕ��������_���Z�����A����ɁA�L���b�V���̃T�|�[�g�B�@�������̂�H�Ƃ������A���낢��Ǝ�������Ă����̂ŁA�d�グ���x��Ă��܂��܂����B�B�B
SourceForge.jp �� HOS �� CVS checkout ���g���ă_�E�����[�h����������A�F������g����Ǝv���܂��B�@�����C�������Ƃ��낪����܂�����A�A������������ƍK���ł��B
���ǁA�����݃x�N�^��ς����̂ŁA������������̂ł͂Ȃ��Ahos-v4/document/mips.txt ���Q�Ƃ��������B
�i�Q�O�O�W�N�V���X���j
�����ǐV���ł����b�ɂȂ��Ă���Adenno_ono �����A���J�u������邻���ł��B�@�撣���Ă��������ˁB�@�c���A���j���A�ƂȂ�ƕ����ɂ����Ȃ��Ȃ��B�B�B
���̂R�A�x�A���ʂɉ߂����Ȃ��ȁA�Ǝv������������A���`����A�Q�Ă��܂����B�@������B�@���ƂQ���A�����B
�@�@�@Eagle �g���āA����G�����B
�@�A�@Inventor �g���āA�t���[���̂��G�����B
�@�B�@���{�b�g���[�V�������l����B
����ȂƂ��납�ȁH
���������A��Ԃ��� Eagle �̃p�[�c��T����Ă���A�Ƃ������b�Z�[�W���������悤�ȁB�@�������ꂽ�̂ł��傤���B
Eagle �̒�R�E�R���f���T�̃p�[�c�́A�W�����C�u���� rcl.lbr �ɂ���܂����A���̑��g���Ƃ��ẮA�R�R����_�E�����[�h�ł��܂��B�@rcl2.lbr, rc-master.lbr, rc-master-smd.lbr �Ȃǂ���܂��B�@���A�T����Ă��� 1015, 1815 �͖����݂����ł��B���i�NjL�j�@1015, 1815 �Ƃ����̂́A�g�����W�X�^�̂��Ƃ������̂ł��ˁB�@����Ȃ�A�g�����W�X�^�̃��C�u�����œ����p�b�P�[�W�̂��̂�I�ׂΗǂ��ł��傤(TO-92�Ƃ��̖��O�ŒT���B�j�B�@R_EU_???? ���`�b�v��R(SMD��R)�ŁAC_EU_???? ���`�b�v�R���f���T(SMD�R���f���T)�B
���Ȃ݂ɁA��R��1608�͂ǂ��ɂ��Ȃ��̂ŁA�R���f���T��1608����R�s�[���Ē�R�̃p�b�P�[�W�o�^���A�g���Ă��܂��B�@���Ƃ́A�������͍̂��A�ł����ˁB
���������A���������Q�B
P��.COM �������烁�[�����͂��Ă����B�@�Ȃ�قǁA�A���P�[�g�ɏ��������ƂJ�ɃR�����g���������Ă���B�@���炵���ł��B�@�܂��A���肢�������Ȃ�܂����B
�i�Q�O�O�W�N�V���Q�O���j
�ėp�}�C�R�� V850ES �̉��͐[���B�@�g���n�߂ĂP�N���o���܂����A���X�Ȃ���ɋC�����܂����B
�O����������Ԃ̃o�X�ł����A�}���`�v���N�X�E�o�X�E���[�h�ƁA�Z�p���[�g�E�o�X�E���[�h������܂��B�@���i�A���C�ɃC���[�W���Ă���̂́A�Z�p���[�g�E�o�X�E���[�h�ł����āA�}���`�v���N�X�E�o�X�E���[�h�ɂ���ƁA�f�[�^�E�o�X�ƃA�h���X�E�o�X�����p�ɂȂ��Ă��āA�}�C�R���̊O���[�q��ߖ�ł���Ƃ����d�l�B�@����SRAM�Ȃǂ̃������ɐڑ�����ꍇ�i�ԂɃo�b�t�@�ȂǓ���Ȃ��ꍇ�j�́A�Z�p���[�g�E�o�X�E���[�h��I��������Ȃ��ł����ACPLD��FPGA����ă��[�J���o�X���\�z����ꍇ�́A�}���`�v���N�X�E�o�X�E���[�h�ł��ˁB
�}���`�v���N�X�E�o�X�E���[�h�́A�f�[�^�E�o�X���A�h���X�E�o�X�Ƃ��Ďg�����̂ł����A�P�N���b�N�ڂ��A�h���X�A�Q�N���b�N�ڂ��f�[�^�A�̂悤�ɂȂ��Ă��邽�߁A�P�N���b�N�]���ɂ����邱�ƂɂȂ�܂��B�@�������A�f�[�^�o�X�����P�U�r�b�g�Ƃ���ƁA�A�h���X�E�o�X�̂P�U�r�b�g�����ėp�[�q�A�������͋@�\�[�q�Ƃ��Ďg���郁���b�g���o�܂��B�@���ɁA�s�����̏��Ȃ��ėp�}�C�R���ł�UART(1�g)�ACSI(2�g)�A
I2C(1�g)�A�^�C�}�[�q�i8�s��)�Ȃǂ��������邽�߁A�P�N���b�N�x�����������b�g�����銴�������܂��B
�Q�l�܂łɁA�}���`�v���N�X�E�o�X�E���[�h�̃^�C�~���O�ƁA��������A�h���X�E�o�X�P�U�r�b�g���̋@�\�[�q�ꗗ�ɂ���V850ES/JG2�}�j���A������̔����������Ă����܂��B
 |
 |
���X�Ȃ��� DesignWave�t�^��Spartan3E�̊�����Ă݂��̂ł����A���܂����삵�Ă���Ȃ��B�@�_�E�����[�h�͂ł��Ă���Ǝv���̂ł����A�k�d�c�`�J�`�J����ł��Ȃ��B�@�_�E�����[�h�̒[�q�ɃI�V���ĂĂ݂邪�A���������M�����łĂ���B�@�O���N���b�N�Ƃ��Ȃ��A�k�d�c���t�����ςȂ��ɂȂ�悤�ɂ��Ă݂邪�A����ł��_���B�@�_�E�����[�h�ł��Ă��Ȃ��Ƃ������Ƃł��傤�B�@���������̂��B�B�B�����_�E�����[�h��@�ŁACPLD�͑��v�Ȃ��ǁB�B�B�@�����Ńn�}���Ă��܂��ƁA�R�A�x�\�肪�ǂ�ǂԂ��Ȃ��Ȃ��Ă����B�B�B
�@�@�@Eagle �g���āA����G�����B�@�E�E�E�@�Q�T�������B�@FPGA�������đ��v���H
�@�A�@Inventor �g���āA�t���[���̂��G�����B�@�E�E�E�@�X�O�������B�@���Ƃ́ADXF�t�@�C���ɂ��邾���B
�@�B�@���{�b�g���[�V�������l����B�@�E�E�E�@�P�O�������@����ς�A�肪���Ȃ��B�B�B
�i�Q�O�O�W�N�V���Q�P���j
�J�G�ł��s����Ƃ��ɍs�����A�Ƃ������ƂŃO�A���ւS���T���̗��s�ɍs���Ă��܂����B�@�O�֏o�������Ƃ��A�V��ł���Ƃ��́A�S���J�Ȃ��A�����ŋx��ł��鎞�����X�R�[��������܂����B�@����A�悩�����B�@���Ă����Ĕw�����q���q���ƒɂ������ł����A�����������݂����ŁA���v�B
�z�e���O�̃r�[�`�ł��A��������̋������Ăт�����B�@����Ȃ�j���Ȃ��q���ł��y���߂܂��ˁB�@�F�Ƃ�ǂ�̋������ɉƑ��S��������Ԃł����B�@�����B�e�p�̃J��������������Ă���킯���킩�����C�����܂��B
 |
 |
�ӂƋC�������̂ł����A�葊�̐��������ĐL�т�̂ł��傤���H�@��A���ɐe�w�����A����H���[���傫���Ȃ�悤�ɂ��v����̂ŁA�葊���ς��̂��킩��悤�ȁB�B�B�@���������A�ȑO��菭�Ȃ��Ƃ��P�����i�������\���H�j�͐L�т����������܂��B
�i�Q�O�O�W�N�W���P���j
�ċx�݂�(�����Ƃ���ȂɎ��Ԃ��Ƃ�Ȃ��͂��Ȃ̂ŁA����ȍ~���܂߂āj�V�Ԃ��߂ɂ��낢��Ɣ����B�@���̂P�j���ʐM�@�����ɋr���t���[���lj��B�@���̂Q�jXilinx HW-USB-II-G (Platform Cable USB II) ���}���c�����ɔ����B�@���̂R�j�˂���䂳���Ƀ`�^���l�W�����B
���̂P�j�t���[���́A�T���h�u���X�g�{���F�̃A���}�C�g���������Ă����������Ƃɂ��Ă��܂��B�@�ȑO�A����������Ă����������ۂɁA�Ƃ��Ă��ǂ������Ɏd�グ�Ă����������̂ŁA������@�ŁB�@����́A�r���̃t���[����ύX�B�@MARU Family �����̃T�[�{�N�[���[���Q�l�Ɂi���̂܂�܁H�j���t���Ă݂܂����B�@6mm���̃t�@�����������̂Ŗ₢���킹�Ă݂��̂ł����A�ŏ����b�g���T�O�O�Ƃ������ƂŒ��߂܂����B�@6mm���ƌ���̃t���[���ł����ڂł����̂ł����A10mm���Ȃ̂ŁA���̒��������ē��ڂ��邱�Ƃɂ��܂����B�@�t�@�������t����l�W��M3�ł��B�@1.5mm���̃A���~�ɂ����̂ŁA�o�[�����O�^�b�v�ɂ��܂����B�@�R�����w�����������������d�オ�����̂ő喞���ł��B�@�i�v�����g�b�v�y�[�W�����j���[�A�������j���ʐM�@�����Ɋ��ӂł��B
 |
�������A�P�_�������c��܂��B�@�t�@���̓d�����ǂ�����Ƃ邩�H�@�����̕��̓T�[�{�p�M�����d�����̓}�C�R���ƂP�P�Őڑ�����Ă���悤�ł��̂ŁAKRS-401x �̒[�q���P�]���Ă��邱�Ƃ������A�����Ƀt�@���̓d�����Ƃ�悢�悤�ł��B�@�ł����A�W�S���[����́A�f�[�W�[�`�F�[���ŃT�[�{���������Ă���̂ŁA������܂���B�@�܂��A�t�@���̂悤�ɒ��I�ɓd�����������̂ƃT�[�{���ꏏ�̐��ɏ悹�ėǂ��̂��H�Ƃ����̂��C�ɂȂ�܂��B�@�o�b�e���[���璼�ڂƂ낤���Ȃ��B�B�B�Ƃ����Ƃ���ł��B
���̂Q�j�@���͋��Ȃ�B�@���낢��ƒ��킷�鎞�Ԃ��ɂ����̂ŁA�����i�����Ƃɂ��܂����B�@���̃v���O���}�ł��ǂ������̂ł����A�����i�̐V�����̂���r�I���������̂ƁA�|�C���g�����܂��Ă���}���c����ōɂ��������̂Ŕ����Ă��܂����Ƃɂ��܂����B�@����ŁA�����Windows�p�\�R���̃p�������|�[�g���瑲�Ƃł��B
 |
���̂R�j�@����́A���̂P���l�^�������Ă��ċC�������̂ł����AM2x20mm���̂��̂��莝���łȂ������̂ŁA����ĂĒ����ł��B�@���łɃt�@���̎��t�����ᓪ�l�W�ŁB
�i�Q�O�O�W�N�W���Q���j
����̂��̂R�j�@�˂���䂳��A�������������B�@��ς����J�ȃ��[�����A���ӂ������܂��B�@���P�F�l�W�̎�ނ�c�����Ă�����˗����s�����ƁB�@����́A�l�R�l�W�Ńt�@�������t���悤�Ƃ����̂ł����A�Ȃ��Ȃ��P�O�����̃t�@�����݂��Œ肷��Ƃ������Ƃ��Â����Ă��܂��ăl�W�̓��萫�����������Ă��܂��܂����B�@���ꂩ��̓l�W�̂��Ƃ��l���ăt���[���������悤�B
����̂��̂Q�j�@�}���c����͂��܂����AHW-USB-II-G�B�@�������A�Ƃ������A������O�ł����A�����i�Ȃ����ɁA�ڑ����邾���ł�����
FPGA, FLASH-ROM �̏������݂��ł��܂����B�@�g�������܂łɑ����̎��Ԃ͂�����ł��傤���ǁA�����Ȃ�Ƃ��Ȃ�A�͂��B
������A������A��肽�����ƁA�ςݎc�������Ƃ���������܂��B�@�������A���C�Ɖf��ӏ܁i�c�u�c�j�A�q���̑�������Ă���Ǝ��Ԃ��Ƃ�Ȃ��ł��ˁB
�i�Q�O�O�W�N�W���R���j
�k���I�����s�b�N���n�܂�܂����B
�i���j���ʐM�@������������H���A���}�C�g�����˗��i���͂��Ƃ������ƂŁA�}篁A�Ƒ��T�[�r�X�E�v�[�����o�����̌�A�H�t���ցB
��\��E���{�b�g�����ł́A�֓��g�݃��{�b�g���K���̐^���Œ��B�@�܂��́A�~�����p�[�c����ɓ���悤�ƁA�������A�������B�B�B���A�����Ă���B
�}���ŁA�q�s�����ցB�@���A�������B�@��͂�A�����Ȃ��X������H�t���͗ǂ��ł��ˁB�@�v���Ԃ�ɁA����В��Ƃ����b���������Ă��������܂����B
�����o�����I������Ƃ���ŁA���K��ցB
�������킳���͂��߁A�F����Ɉ��A�����āA�������킳��̍\�z���f���B�@���炵���ł��B�@���{�b�g�������Ȃ��ōs������������Ȃ��B�B�B
�����������Ă��邤���ɁA�ʐ^�̃��{�b�g���o��B
 |
����������B�@�̒��W�O�����ŁA��������ƕ����Ă���B�@�S�O�����قǂ̃��{�b�g�R�̂��Z�����߂邪�|��Ȃ��B�@�N���オ������̍ۂ��A���̃��{�b�g���W�Q���Ă������ƋN���オ��B�B�B�@����͒����ɕς���Ă���B�@�������P��������_�����A���܂̂S�O��������_�����A���働�{��_�����B�B�B
�i�Q�O�O�W�N�W���X���j
�@����m�K���_���A�y�K���_�������Ȃ��烍�{�b�g��B
�@�@���ʐM�@����͂����p�[�c�ɓ���ւ��ł��B�@���̍ۂɂ��łɍs�����̂��A�s�b�`���� KRS-4014 �� 4013 �����邱�ƁB�@���^���M�A�Z�b�g�R���g���A�M�A�䂪�ς���āA�t���ɔ����ւ��Ȃ��Ă� 4013�ɂł���i�͂��j�B�@���łɁA�A���~�A�b�p�[�P�[�X�ɂ��ύX����̂ł����A�����ɂP��]���₯�ɏd�����Ȃ���̂�����܂����B�@���[�^�[�ƂP�ڂɃM�A�̂��ݍ��킹���ł��݂����ł��B�@�ǂ���������̂ł��傤�B�B�B�i�����������[�J�[�ۏ؊O�̎g�����̂͂��Ȃ̂ŁA�₢���킹�Ă��_�����낤�Ȃ��B�B�B�j
�A�@HOSv4 �� SEMB1200A �ł̂����B�@�ڐA�͂������̂́AHOSv4 (ITRON) ���}�X�^�[���Ă��Ȃ��̂ŁA���A���B�@����̂܂܂��ƁAEclipse
���ɏ悹�悤�Ƃ��Ă� hos4cfg �����܂�����ł��Ȃ��̂ł����A�ǂȂ����e�N�j�b�N����������܂��H�@�v���v���Z�b�T�Ƃ���
foo.cfg �� kernel_cfg.c �� kernel_id.h �����o�����̂Ȃ̂ł����A�����
gcc �ŃR���p�C������āA�����N���������B�@��������܂ł́A�n���� cygwin
�Ői�߂܂����˂��B�B�B�@�ꉞ�A�������c���āB�B�B
�܂��Agcc �̃v���v���Z�b�T�����������g���āA���ߕ����폜���Ă���݂����ł��B
gcc -E -x c -Wall -pipe foo.cfg > te.txt
���̌�Ahos4cfg �� kernel_cfg.c, kernel_id.h ������܂��B�@�Ȃ�قǁA�ǂ��ł��Ă��܂��ˁB
| foo.cfg | te.txt |
/* HOS �Ǝ��̐ݒ� */ HOS_KERNEL_HEAP(4096); /* �J�[�l���q�[�v�̐ݒ�(�ȗ��� 0) */ HOS_TIM_TIC(1, 1); /* �^�C���e�B�b�N�̐ݒ�(�ȗ��� 1/1 ) */ HOS_MAX_TPRI(16); /* �ő�D��x(�ȗ��� 16) */ HOS_MIN_INTNO(0); /* ���荞�ݔԍ��̍ŏ��l(�ȗ��� 0) */ HOS_MAX_INTNO(255); /* ���荞�ݔԍ��̍ő�l(�ȗ��� 0) */ HOS_MAX_TSKID(16); /* �ő�^�X�NID�ԍ�(�ȗ����ÓI�����ɕK�v�Ȃ���) */ /* �A�C�h���^�X�N�p�X�^�b�N�̊m�� */ HOS_IDL_STK(4096, NULL); /* 1024 */ /* ���荞�݃n���h���p�X�^�b�N�̊m�� */ HOS_INT_STK(4096, NULL); /* 1024 */ /* �C���N���[�h�t�@�C���̎w�� */ INCLUDE("\"sample.h\""); INCLUDE("\"ostimer.h\""); INCLUDE("\"irq_sample.h\""); INCLUDE("\"mips/vect.h\""); /* OS�^�C�}�p */ ATT_ISR({TA_HLNG, 0, HOS_VN_IP7, ostim_hdr}); ATT_ISR({TA_HLNG, 0, HOS_VN_IP2, int2_main}); /* ���������[�`���̓o�^ */ ATT_INI({TA_HLNG, 0, sample_init}); ATT_INI({TA_HLNG, 0, ostim_init}); ATT_INI({TA_HLNG, 0, int2_init}); /* �T���v���^�X�N�̐��� */ CRE_TSK(TSKID_SAMPLE_1, {TA_HLNG, 1, sample_task_1, 1, 4096, NULL}); /* 1024 */ CRE_TSK(TSKID_SAMPLE_2, {TA_HLNG, 2, sample_task_2, 2, 4096, NULL}); /* 1024 */ /* �Z�}�t�H�̐��� */ CRE_SEM(SEMID_SAMPLE_1, {TA_TFIFO, 0, 1}); /* �����^�C�}�̐��� */ CRE_CYC(CYCID_SAMPLE_1, {TA_HLNG, 0, sample_cycle_handler, 1000, 0}); |
# 1 "system.cfg" # 1 "<built-in>" # 1 "<command-line>" # 1 "system.cfg" HOS_KERNEL_HEAP(4096); HOS_TIM_TIC(1, 1); HOS_MAX_TPRI(16); HOS_MIN_INTNO(0); HOS_MAX_INTNO(255); HOS_MAX_TSKID(16); HOS_IDL_STK(4096, NULL); HOS_INT_STK(4096, NULL); INCLUDE("\"sample.h\""); INCLUDE("\"ostimer.h\""); INCLUDE("\"irq_sample.h\""); INCLUDE("\"mips/vect.h\""); ATT_ISR({TA_HLNG, 0, HOS_VN_IP7, ostim_hdr}); ATT_ISR({TA_HLNG, 0, HOS_VN_IP2, int2_main}); ATT_INI({TA_HLNG, 0, sample_init}); ATT_INI({TA_HLNG, 0, ostim_init}); ATT_INI({TA_HLNG, 0, int2_init}); CRE_TSK(TSKID_SAMPLE_1, {TA_HLNG, 1, sample_task_1, 1, 4096, NULL}); CRE_TSK(TSKID_SAMPLE_2, {TA_HLNG, 2, sample_task_2, 2, 4096, NULL}); CRE_SEM(SEMID_SAMPLE_1, {TA_TFIFO, 0, 1}); CRE_CYC(CYCID_SAMPLE_1, {TA_HLNG, 0, sample_cycle_handler, 1000, 0}); |
�B�@�}�C�R������쒆�B�@V850ES ���R�A�Ƀ~�j��͏I���B�@���Ȃ�\�z�́ASpartan3E+4Mbit-SRAM ���ڂ̃{�[�h�B�@�P��ɓ��ڂ��邩�A�ʊ�ɂ��邩�B
 |
�@�@�����̏ꍇ�́A���[�J���o�X�iAD0-21, etc.) �͊O�ɂ͏o���Ȃ�����ɁAFPGA ��I/O 41�{��S�ďo���Ƃ��悤���ȁB�@FPGA �� V850 �̃o�X��ɍڂ���A���� BLOCK-RAM ��V850�̃�������ԏ�ɔz�u������A�ėpI/O�̐���p�f�[�^����������ԏ�ɔz�u�ł������B�@�Ђ��т��� VHDL ������ď����Ă݂邱�Ƃ���J�n�ł��傤���ˁB
�i�Q�O�O�W�N�W���P�P���j
HOSv4 �ɂ�鐧��v���O�������l�����B
�T�[�{�̐����A�R���g���[����Z���T�Ȃǂ̊O���@��ʐM�A�^���w�ɂ��v�Z�A�����̍����B�B�B�C���[�W���͂�����ƌ��܂�Ȃ��B�@PPT2007�Ɋ���邽�߁H�t���[�������o���Ă݂�B�@�}�ɂ͂ł���̂ł����A�R���g���[��������x�Z���T�A�o�b�ɂ��f�o�b�O�̕��������ɕ\�����ł��Ȃ��̂ł��B�@���������Y��ł݂悤�B�B�B
 |
���ƁA���m�点�H�ł����ASEMB1200A �� CPU(UX1200E)�̊����݂Ȃǂ̋Z�p���킩��Ȃ��A�Ƃ������AHOSv4 �̒��ɗ�������Ă���܂��̂ŁA�Q�l�Ɂihos/hos-v4/sample/mipsgcc/irq_sample.c�j�B�@�����HOS���g��Ȃ��ꍇ�ł������L�q�ɂł��܂��̂ŔY�݉����ł���̂ł́H�Ǝv���܂��B
�i�Q�O�O�W�N�W���P�S���j
�����j�@�����Y�������B
�E cygwin bash �� ~/.bashrc ��L���ɂ�����@
�@�@/etc/profile �̖����� "test -f ~/.bashrc && . ~/.bashrc"
�������B
HOSv4 �̃^�X�N�Ǘ����@���Ȃ�ƂȂ��킩���Ă������������܂��i�Ԉ���Ă��A�Ƃ������Ƃł�����A���[��������Ə�����܂��j�B
�܂��Asystem.cfg �ƃ^�X�N�i�T���j�ɂ��Ă��ꂼ��L���܂��B
| system.cfg (�ꕔ�����j |
1: ATT_INI( {TA_HLNG, 0, init_task} );
2:
3: CRE_TSK( TSKID_SENSOR, {TA_HLNG, 1, task_sensor, 1, 4096, NULL} );
4: CRE_TSK( TSKID_SERVO, {TA_HLNG, 2, task_servo, 2, 4096, NULL} );
5: CRE_TSK( TSKID_DYNAMIC_WALK, {TA_HLNG, 3, task_dynamic_walk, 3, 4096, NULL} );
6: CRE_TSK( TSKID_MAIN, {TA_HLNG, 4, task_main, 4, 4096, NULL} );
7:
8: CRE_SEM( SEMID_SENSOR, {TA_TFIFO, 0, 1} );
9: CRE_SEM( SEMID_ACT_TASK, {TA_TFIFO, 0, 1} );
10:
11: CRE_CYC( CYCID_SERVO, {TA_HLNG, 0, cycle_servo, 3, 0} );
|
| �^�X�N�T�� |
1: void task_sensor( VP_INT exinf )
2: {
3: /* �����ɖ{�^�X�N�̏��������L�� */
4: while( 1 ) {
5: wai_sem( SEMID_SENSOR ); // task_servo() �ɂ�����
6: /* �����ɃZ���T�ǂݎ��Ȃǂ̏������L�� */
7: }
8: }
9: void task_servo( VP_INT exinf )
10: {
11: /* �����ɖ{�^�X�N�̏��������L�� */
12: while( 1 ) {
13: slp_tsk(); // �����^�C�}�ɂ��X���[�v����
14: /* ������ ICS2 �f�[�^�擾�������L�� */
15: /* �����Ɋp�x�E�X�s�[�h�E�X�g���b�`�̔���ƕ�����L�� */
16: sig_sem( SEMID_SENSOR ); // �Z���T�p�Z�}�t�H����
17: /* ������ ICS2 �f�[�^���M�������L�� */
18: sig_sem( SEMID_ACT_TASK ); // �~�߂��Ă���^�X�N������Γ��삳����
19: }
20: }
21: void task_dynamic_walk( VP_INT exinf )
22: {
23: /* �����ɖ{�^�X�N�̏��������L�� */
24: do {
25: wai_sem( SEMID_ACT_TASK ); // task_servo() �ɂ�����
26: /* �����Ɏ����ɉ�����������v�Z���鏈�����L�� */
27: } while( /*�I������*/ );
28: ext_tsk();
29: }
30: void task_main( VP_INT exinf )
31: {
32: while( 1 ) {
33: /* �����ɖ{�^�X�N�̏������L��, act_tsk(TSKID_DYNAMIC_WALK) �Ȃ� */
34: }
35: }
36: void init_task( VP_INT exinf )
37: {
38: act_tsk( TSKID_SENSOR );
39: act_tsk( TSKID_SERVO );
40: act_tsk( TSKID_MAIN );
41: sta_cyc( CYCID_SERVO );
42: }
43: void cycle_servo( VP_INT exinf )
44: {
45: iwup_tsk( TSKID_SERVO );
46: }
|
�@HOS�ɂ��N����Ainit_task(), cycle_servo() ���Ăяo����A�e�^�X�N�����s����܂��B�@task_main()
�͑҂���ԂɂȂ邱�Ƃ͂Ȃ����������悤�ɂ��āA���� task_main() ���瓮���s�v�Z������A�o�^���[�V�����Đ��̂��߂̕�Ԍv�Z�����Ȃǂ�
act_tsk() �ɂ��ڍs���܂��B�@����ɁA�����s�v�Z(task_dynamic_walk())���Ԍv�Z�ł́A�u���̎����v�ɍ��킹���v�Z�����������̂ŁA�Z�}�t�H
SEMID_ACT_TASK ����������閈�Ɍv�Z���������s�����悤�ɂ��Ă��܂��B
�@task_sensor() ��Ɨ��^�X�N�ɓo�^���Ă��܂����Atask_servo �ɓ���Ă��ǂ���������܂���ˁB
�@����ɂ��A����Y��ł����R���g���[����o�b�i�f�o�b�O�j�ɂ��R�}���h���̏����̋L�q���ł����悤�Ɏv���܂��B�@�����̂Ȃ��ł͂������肵�������ł��B
�i�Q�O�O�W�N�W���P�U���j
�@�������� HOS �ł̃v���O���~���O���B�@����̃Z�}�t�H�ɂ��Ǘ��������܂������A�C�x���g�t���O�̕����������肵�����Ȃ̂ŁA�ύX�B�@�܂��Atask_main() �ł̃��{�b�g����̕����ʃ^�X�N�Ŏ���������@���A���܈�������̂ŁAtask_main() �̒��Ŏ��{���邱�ƂɁB�@����ɂ������肵�܂����B
| system.cfg (�ꕔ����) |
1: ATT_ISR( {TA_HLNG, 0, HOS_VN_IP7, hdr_os_timer} );
2:
3: ATT_INI( {TA_HLNG, 0, init_os_timer} );
4: ATT_INI( {TA_HLNG, 0, init_task} );
5:
6: CRE_TSK( TSKID_SERVO, {TA_HLNG, 1, task_servo, 1, 4096, NULL} );
7: CRE_TSK( TSKID_MAIN, {TA_HLNG, 2, task_main, 2, 4096, NULL} );
8:
9: CRE_FLG( FLGID_ACT_TASK, {TA_TFIFO | TA_WSGL | TA_CLR, 0} );
10:
11: CRE_CYC( CYCID_SERVO, {TA_HLNG, 0, cycle_servo, 3, 0} );
|
| �^�X�N�T�� |
1: void task_servo( VP_INT exinf )
02: {
03: /* �����ɖ{�^�X�N�̏��������L�� */
04: while( 1 ) {
05: slp_tsk(); // �����^�C�}�ɂ��X���[�v����
06: /* ������ ICS2 �f�[�^�擾�������L�� */
07: /* �����Ɋp�x�E�X�s�[�h�E�X�g���b�`�̔���ƕ�����L�� */
08: /* �����ɃZ���T�l�ǂݎ�� */
09: /* ������ ICS2 �f�[�^���M�������L�� */
10: set_flg( FLGID_ACT_TASK, 0x0001 );
11: }
12: }
13: FLGPTN p_flg;
14: void dynamic_walk( VP_INT exinf )
15: {
16: /* �����ɖ{�^�X�N�̏��������L�� */
17: do {
18: wai_flg( FLGID_ACT_TASK, 0x0001, TWF_ANDW, &p_flg );
19: /* �����Ɏ����ɉ�����������v�Z���鏈�����L�� */
20: } while( /*�I������*/ );
21: }
22: void task_main( VP_INT exinf )
23: {
24: while( 1 ) {
25: /* �����ɖ{�^�X�N�̏������L��, �R���g���[���ɂ�� dynamic_walk()�Ăяo���Ȃ� */
26: }
27: }
28: void init_task( VP_INT exinf )
29: {
30: act_tsk( TSKID_SERVO );
31: act_tsk( TSKID_MAIN );
32: sta_cyc( CYCID_SERVO );
33: }
34: void cycle_servo( VP_INT exinf )
35: {
36: iwup_tsk( TSKID_SERVO );
37: } |
�i�Q�O�O�W�N�W���P�V���j
HOSv4 �̑������������ł��B
MIPS ���߂� FPU ���W�X�^�� double �^�Ŏg�����̂�����܂����A���̖��߂́A8byte��
align ����Ă��Ȃ��Ɨ�O���߈����ɂȂ��Ă��܂��܂��B�@HOSv4 �ŁAkernel_int_sp
���s�K�ɂ���8byte-align ����Ă��Ȃ��ꍇ������炵���A���܂Ɏ~�܂��Ă��܂��s��ɔY�܂���Ă��܂����B�@���݁AHOSv4
�� kernel �Ɏ�������Ȃ��ł��ޕ��@��͍����ł��B
�@�@LDSCRIPT �� semb1200a-rom.ld �̗v���v���� . = ALIGN(8); �����������B
���������A���ꂾ���͍Œ������Ă��������Ƃ���B�@�����ނˁA�@�����ł������Ă������ł����A���ׂĂ̏�����������킯�ł��Ȃ��̂ŁAmipsel-semb-elf-gcc �̏����Ƃ��� align �����悤�ɏ��u���Ă��������Ƃ���ł��B
�i�Q�O�O�W�N�W���Q�O���j
�i���̂P�j
�����HOSv4�̑����ł��B
�悤�₭�킩��܂����B
����̂����炢����B
kernel_cfg.c �����o�� hos4cfg �d�l�ł́A�@ idle stack, �A int stack ���R���p�C���̃A�h���X�E�A���C���ɔC����Ă��āA�ǂ��ɔz�u����邩�킩��܂���B�@����ASEMB1200A
�̊J������ .align 2 �ƂȂ��Ă��܂����߁A.align 8 �����҂��ē��삷��A�U�S�r�b�g�̃��[�h�E�X�g�A���߂ŃA�h���X��O���������Ă��܂��܂��B�@�U�S�r�b�g�̃��[�h�E�X�g�A���߂́A�X�^�b�N�̕��A�E�ޔ��ȊO�͖����悤�ł��B�@����������A��̇@�A�A�����P�A����Α��̓R���p�C�������Ɉ����Ă���Ă���悤�ł��idouble�^��FPU���g�������Z�Ȃǂ́Adouble�^�̕ϐ��̃������z�u�̓R���p�C���ɂ�.align
8 �ƂȂ��Ă��܂��j�B
�����ŁAinclude/mips/hospac.h �ł�����Ƃ������Z���{���āA�����Ȃ郁�����z�u��
hos4cfg �ōs���Ă��A���W�X�^�̕��A�E�ޔ��ɑ��ẮA�W�̔{���̃A�h���X���A�N�Z�X����悤�ɂ��Ă݂܂����B
| #define hospac_cre_ctx(pk_ctxinf, exinf, task, stksz, stk) | ���j�@hospac_cre_ctx_asm(pk_ctxinf, (VP)((UB *)(stk) + ((stksz) & 0xfffffffc)), task, exinf) |
| �@ | �V�j�@hospac_cre_ctx_asm(pk_ctxinf, (VP)((UB *)(((unsigned long)stk + stksz) & 0xfffffff8)), task, exinf) |
������Ƌ�����������܂��A���ʃJ�[�l���ύX�Ȃ��A���肵�čs���ɂ́A���ꂪ�x�X�g�̂悤�ł��B�@���ӓ_�́A��L���Z�ōň����҂��Ă���X�^�b�N�̈悪�V�o�C�g�قǏ������݂���\��������܂��̂ŁAhos4cfg �ŕϊ����� system.cfg �ł� HOS_IDL_STK, HOS_INT_STK �ł͏����傫�ڂ̒l�ɂ��Ă������Ƃ��K�v�ɂȂ�܂��B�@�����Ƃ��Asemb1200a �̏ꍇ�A���̃}�C�R���Q�������|�I�ɑ傫�ȍ��������q�`�l�������Ă��܂��̂ŁA�V�o�C�g���炢�Ȃ�傫�߂Ɏw�肵�Ă��Ȃ����ɂ͂Ȃ�Ȃ��Ǝv���܂��B
����ň�A�̕s��͎������Ǝv���܂��B�@�ŐV�̃\�[�X�R�[�h�Ƃ��Ďd�グ����A sourceforge �ɂ����Ă����܂��B�@�A�b�v�����ʒm�͂��̃y�[�W�ɏ����悤�ɂ��܂��B
�i���̂Q�j
SEMB1200A ���g����ł̎��̊��ł����A�ŋ߂̃p�\�R���� RS232C ���Ȃ��Ȃ����Ă��Ȃ��̂ŁAUSB �Őڑ��������Ƃ���B�@�����ŁAStrawberry-Linux���� ���H���d�q�ʏ������œ���\��USB-RS232C�ϊ����^����g���Ă��܂��B�@�����ɂ́ARXD, TXD,
GND ��2.54mm�s�b�`�̃X���[�z�[������ɔz�u����Ă��܂��̂ŁA������
SEMB1200A �ƃN���X�Őڑ�����Ί����B�@SEMB1200A ���̃R�l�N�^�́A�R�R�ŏЉ�Ă悤���q�r�R���|�[�l���c�����ň����[�q�t���P�[�u�����w�����g�p���Ă��܂��B
�i�Q�O�O�W�N�W���Q�R���j
���{�b�g���ڗp�̃J�����ɂ��čl���Ă݂܂����B�@�Q�ɕ��ނł���̂��ȁH�@�@�����ɂĉ摜�݂̂����ĉ��u����p�ɗp����A�A���{�b�g�{�̂̃}�C�R���ɂĉ摜�������s����������p�Ɏg���B�@����܂ŇA�𒆐S�ɍl���ė����̂ł����A�@���ʔ��������ȁA�Ɓi���X�Ȃ���j�����n�߂܂����B�@�K���_���Ƃ��̃��{�b�g�A�j���̂悤�ɁA��{�͐l�Ԃ����ē��삳���邯�ǁA�⏕�Ƃ��ē����}�C�R�����摜��͂���A���Ă����̂��ڎw���ׂ���P�i�K�Ȃ̂�������܂���B
�����ŁA�T���Ă݂�ƈӊO�Ə��^�Ŗ������g���ĉ摜�鑕�u���đ������ƂɋC���t���܂����B�@CP-18PW��TC-9�ȂǂƂĂ����^�J�����ŗǂ������ł��B�@���Ƃ��ƁA�h�Ɨp�A�S���͌^�p�ɔ̔�����Ă�����̂ł��B�@�������A��M�@�����Ƃ��Ă��傫���̂ŁA�������{�b�g�ɓ����ƂȂ����ꍇ�͋�J���邩���B
���ƁAHOSv4 ���X�V���Ă����܂����B�@�X�V�ł́Asourceforge.jp ��� CVS ���g���ē��肵�Ă��������B
�ēx�A�A�b�v�f�[�g���܂����i�P�X�F�T�O�j�B
���e�́A�ȉ��̒ʂ�ł��B
�@hospac_cre_ctx_asm() ���̈�����ύX�B�@�������Ԃ̕ύX�ihospac_cre_ctx()
�ɍ��킹��j�ƁA0xFFFFFFF8 �Ƃ� and �����̂́A�A�Z���u���ŋL�q���� hospac_cre_ctx_asm()
�����ōs���܂����B
| #define hospac_cre_ctx(pk_ctxinf, exinf, task, stksz, stk) | ���j�@hospac_cre_ctx_asm(pk_ctxinf, (VP)((UB *)(stk) + ((stksz) & 0xfffffffc)), task, exinf) |
| �@ | �O�j�@hospac_cre_ctx_asm(pk_ctxinf, (VP)((UB *)(((unsigned long)stk + stksz) & 0xfffffff8)), task, exinf) |
| �@ | �V�j�@hospac_cre_ctx_asm(pk_ctxinf, exinf, task, stk+stksz) |
�i�Q�O�O�W�N�W���Q�S���j
gcc-4.3.2 �������[�X���ꂽ�̂ŁAmipsel-semb-elf ������낤�Ƃ����� gmp, mpfr �ł܂Â����B�@Web��������Ǝ����悤�Ȃ̂�����o�Ă��܂����B�@�ꉞ�A�����ɂ������Ă����܂��B
| gmp | ftp://ftp.dti.ad.jp/pub/GNU/gmp/ �Ȃǂ��� gmp-4.2.3.tar.bz �ȂǓ��肵�A/usr/local/spool
�ȂǂɃR�s�[�B % cd /usr/local/src % tar xvfj /usr/local/spool/gmp-4.2.3.tar.bz % mkdir cygwin % cd cygwin % mkdir gmp % cd gmp % ../../gmp-4.2.3/configure --prefix=/usr/local % make % make install |
| mpfr | http://www.mpfr.org/ ���� mpfr-2.3.1.tar.bz �Ȃǂ���肵�A/usr/local/spool
�ȂǂɃR�s�[�B % cd /usr/local/src % tar xvfj /usr/local/spool/mpfr-2.3.1.tar.bz % mkdir cygwin % cd cygwin/mpfr % ../../mpfr-2.3.1/configure --prefix=/usr/local % make % make install |
| gcc | ftp://ftp.dti.ad.jp/pub/GNU/gcc/ �Ȃǂ���Agcc-core-4.3.2.tar.bz �Ȃǂ���肵�A/usr/local/spool
�ȂǂɃR�s�[�B % cd /usr/local/src % tar xvfj ../spool/gcc-core-4.3.2.tar.bz % mkdir mipsel-semb % cd mipsel-semb % mkdir gcc-4.3.2 % cd gcc-4.3.2 % ../../gcc-4.3.2/configure --target=mipsel-semb-elf --prefix=/usr/local --with-newlib --enable-languages=c \ --disable-threads --disable-shared --disable-libssp --with-gmp=/usr/local --with-mpfr=/usr/local % make % make install |
�|�C���g�́Agmp, mpfr �� version �ƁAgcc �� configure �ł� --with-gmp, --with-mpfr �ŁA�C���X�g�[�������f�B���N�g�����w�肷�邱�Ƃł��B
�i�Q�O�O�W�N�W���R�O���j
�����Z���T�̒����ł��B�@����ł����̂��ȁH�@�P�̑����ɂS�̈��̓Z���T�̋����������͂œ����l�ɂȂ�悤�ɒ����������ƍl���Ă��܂��B�@����́A�����Z���T�ɂ�� ZMP �𐳂������߂�������Ȃ̂ł����A�l����������B�@���Ƃ��ƃZ���T���̂��̂������Ă���덷�AOPAMP�ő�������ۂ̌덷�A���̑��d�C�I�Ȍ덷�̑��A�S�ɓ������͂�������A�Ƃ������Ƃ�����̂ł��B�@�����ǂ��A�C�f�A�͂Ȃ����̂ł��傤���B�B�B
 |
�Ƃ肠�����A�S�̒��S�_�t�߂P�_�ʼn��������ꍇ�Ɉ��͕ϊ��l���������炢�ɂȂ�悤�ɓd�C�I�ɒ������܂����i�S�ڂ̓ʕ��j�B�@����Ő�����ZMP��������͂��B�@���Ƃ́AZMP ���W�������̍��W�͈͂���O��Ȃ��悤�ɕ���A�d�S���W�v�Z����Ηǂ��͂��B
�O�㎲�@�F�@�i�����̃J�J�g���W�j�@���@�i�����Z���T�ł̂y�l�o�O����W�j�@���@�i�����̂ܐ���W�j
���E���@�F�@�i�����̓������W�j�@���@�i�����Z���T�ł̂y�l�o���E���W�j�@���@�i�����̊O�����W�j
�i�������A�O�㎲�ł́A�O���{�A���E���ł͊O�����{�Ƃ���j
���ƁA����� gcc-4.3.2 �l�^�ł����Across-compile ���͐����������Ă���݂����ł��B�@�V�������̍D���Ȃ̂ŁA�����ς��Ă��܂��̂ł����A�o�O�Ȃ��i�����Ă��e���Ȃ��j�����[�X���Ă���������͔̂��ɏ�����܂��ˁB
�i�Q�O�O�W�N�W���R�P���j
HOSv4 �֘A�ł��B�@V850ES/JG2 �ł����삪�\�ƂȂ�܂����B�@�V�}�t�W�d�@����̂Ƃ����
uITRON4�� uT-Kernel �ւ̈ڐA���s���Ă��܂����A����ɑ��� uITRON4 �݊���
RTOS�ڐA�ł��B�@�i�������ATOPPERS�������Ă��܂��ˁj
�茳�ɁAMinicube2 �̌��܂ł������� V850E/IG3 �{�[�h������܂��̂ŁAV850ES
�����ł͂Ȃ� V850E �S�ʂł̓��삪�ł���悤�ɓW�J���Ă݂����Ǝv���܂��B
�h�L�������g��T���v���Ȃǐ������I��莟��A�{�� HOS �̃T�[�o�փA�b�v���[�h���܂��̂ŁA���炭���҂����������B
�i�Q�O�O�W�N�P�O���S���j
HOSv4 �� V850ES/JG2 �ڐA�ɂ��Ăł��B�@��ʂ萮�����I���܂����̂ŁAsourceforge�̃R�R �ɃA�b�v���[�h���܂����B�@SEMB1200A �Ɠ��l�A�T���v���R�[�h�ɂ��낢��Ȋ����݃x�N�^�̐������s���Ă����܂����̂ŁA�n�[�h�E�F�A���[�U�[�Y�}�j���A����Ў�ɐ����͂ł��邩�Ǝv���܂��B�@������@�́Acvs �ɂ�� checkout(co) ���s���ă_�E�����[�h���Ă��������B�@
����́A�ȉ��������ł��B
�@�@��{�I�ȃ��C�u�����̍쐬�́Acygwin, msys ��ōs���i�������ANEC�G���N�g���j�N�X���������R���p�C���ꎮ�͕K�v�j�B
�A�@���C�u�����쐬���ł�����A���̌�́A������������ PM+ ��ōs����B
�B�@HOS �p�̃R���t�B�M�����[�^�� PM+ �Ŏ��s�ł���i�T���v���Ƃ��Ă�PM+���t�@�C���̓Y�t(sample/v850es/sample.prw)�ƁA�h�L�������g�ɐݒ���@�������Ă����܂����j�B
HOSv4 ���ڐA���Ăł����A���ɈڐA���R�x�̍��� RTOS ���Ƃ������Ƃ����߂Ċ����܂����B�@�R�c���킩�����̂ŁA���̃^�[�Q�b�g�f�o�C�X�����܂�����A�������ƈڐA�ł������ȋC�����܂��B
���ƁA��L�@���ǂ����Ă����Ȃ��Ƃ��Ahos4cfg.exe �����Ȃ��A�Ƃ������A��������Ⴂ�܂�����f�o�b�O�Ƃ������Ƃŋ��͂����������Ƃ�O��ɔz�z�������܂��̂ŁA�A������������Ǝv���܂��B
�Ƃ���ŁA����10����ROBO-ONE�͑������������s�������Ȃ��Ƃ������ƂŌ����Ă���̂ł����A�ڕW�����߂ă��{�b�g�ɐG��Ȃ��ƁA��蓹���肵�Ă��܂��܂��ˁB�@denno-ono ����̏����W�ɂ͑�Ϗ�����܂��B�@���ꂳ���ǂ�ł���A�ŋ߂̓����������Ƃ����ƂȂ��i���x���I�ɂǂ�ǂ����Ă������Ƃ����͎������Ȃ���j�A��ɖv���ł��܂��B�@NHK ����I�t�@�[�̂������Ă���T�C�g���������������܂��B�@��������f���炵�����X�B�@TV���f�������̂����M������܂��A����݂Ă݂������̂ł��B
�i�Q�O�O�W�N�P�O���T���j
ONO-ONE ���肪�Ƃ��������܂��I > denno_ono ����
V850ES �p HOSv4 �̂Â��ł��B
�������ł��܂����B�@����̉��œ��e�́A-reg22, -reg26 ���[�h�i�O���ϐ����W�X�^�@�\�j�̃��C�u�����쐬���̕ҏW���ڂ����炷�H�v�����Ă݂܂����B�@���������A���傱�܂��Ɖ��P�����Ă݂����Ǝv���܂��B�i��{�d�l�͕ς��Ȃ��ł��j
�i�Q�O�O�W�N�P�O���U���j
������ROBO-JAPAN �� ROBO-ONE �\�I�̓��ł����A�s���ƓV��ɂ�莩��ł̂�т�A�Ƃ������ƂɂȂ�܂����B�@���̓V�C�Ȃ�A�����͒����炨�o�����ł��傤�B
�Ƃ������ƂŁAHOSv4 �� V850ES �������Ȃ����܂����B�@���߂� CVS �ɂ�
sourceforge ����Q�b�g������ƍK���ł��B
�ύX�_�́Alibh4v850es.a �� -reg22, -reg26, -reg32 �Ƃ����O���ϐ����W�X�^�ɑΉ�������Ƃ������̂ł��B�@�ȑO�́A10/6�̋L�ڒʂ�ł������Amakefile
���̍H�v�Ńt���I�[�g�쐬���\�ɂȂ�܂����B�@����������B
�Q�l�܂łɁA�O���ϐ����W�X�^�Ƃ����̂́AV850E(S) �̏ꍇ�A32�{����32�r�b�g���W�X�^�������Ă��܂��̂ŁA����̈ꕔ��ʏ�RAM��ɔz�u�����ϐ��Ɋ���U���āA�����A�œK�����悤�Ƃ������̂ł��B�@�ϐ����̂��̂́APM+
�Œ�`�ł��܂��B�@RTOS�̏ꍇ�A�^�X�N��ւ��i�f�B�X�p�b�`�j�̃^�C�~���O�őS���W�X�^��
push ,pop ���܂��B�@�O���ϐ����W�X�^�͂��̑ΏۊO�ƂȂ�܂��̂ŁA�f�B�X�p�b�`�̍������ɂ��𗧂������A�Ƃ������ƂŐϋɓI�ɐ��荞�݂܂����B�@���ہACA850
�Ȃ�C�R���p�C���͂���قǃ��W�X�^�𑽗l���Ȃ����Ƃ�����܂��̂ŁA�O���ϐ����W�X�^��
-reg22 ���w�肵�A�P�O�̃��W�X�^�ϐ����w�肷��ƁA�����v���傫���Ƃ����܂��B�@�ݒ���@�̏ڂ��������́ACQ�o��
Interface 2008�N 5�����̎��̋L�����������������i�j�B
�ꉞ�A����ɂ� V850ES �Ή��͏I���ɂ������Ǝv���Ă܂����A�o�O����������i�������j�C���������Ǝv���܂��B�@�C�������Ƃ��낪����A���A������������Ƃ�������܂��B�@���@�F�l
�i�Q�O�O�W�N�P�O���P�P���j
��2���B�@�Ƃ��Ă��g���Ă��ăC���C�����Ă��܂����̂ŁA�R�R�Ƀ������c���Ă����܂��B�@V850�p�R���p�C��CA850 �̃w���v���j���[�ł����AWindows�R���\�[�����ł� > help.txt �Ȃǂ��Ă��e�L�X�g�ŗ��Ƃ��܂���ł����B�i�P�ɂ������Ԉ���Ă��邾���H�j�@�����ŁA�Ƃ����@�ʼn��Ƃ��S����ۑ��ł����̂ŁA�R�R�ɏグ�Ă����܂��B�@�����\�t�g�����A���� copyright �Ȃǂ̕������Ȃ��̂ŗǂ��ł��傤�B�@�����N���[����������Ȃɂ������̕��@�őΉ����܂��i�j�B
For V850/V850E on Microsoft(R) Windows(R) == OPTIONS(other options are passed to ld) == -C : make preprocessor preserve C style comments -D<name>[=<def>] : define preprocessor symbol 'name' -E : run source through preprocessor, output to stdout -Fic[=<file>] : output intermediate language file -Fo[=<file>] : output object file -Fs[=<file>] : output assembler source file -Fv[=<file>] : output assemble list file -G<num> : specify maximum data size to locate sdata/sbss section -I<dir> : add directory 'dir' to preprocessor include path -L<dir> : add directory 'dir' to ld library path -O[<c>...] : specify optimization item -P : run source through preprocessor, output to '.i' file -S : produce '.s' file. do not run as -U<name> : delete initial definition of preprocessor symbol 'name' -V : print version and copyright -W<c>,<arg>[,<arg>...] : pass option 'arg' on to phase 'c' -X256M : X256M option(see your manual) -Xbyte : Xbyte option(see your manual) -Xbitfield : Xbitfield option(see your manual) -Xbpc=<num> : Xbpc option(see your manual) -Xchar : Xchar option(see your manual) -Xcre_sec_data_only[=<file>] : Xcre_sec_data_only option(see your manual) -Xcre_sec_data[=<file>] : Xcre_sec_data option(see your manual) -Xcxxcom : Xcxxcom option(see your manual) -Xcase : Xcase option(see your manual) -Xc : Xc option(see your manual) -Xdefvar : Xdefvar option(see your manual) -Xd : Xd option(see your manual) -Xe : Xe option(see your manual) -Xenum_type=<type> : type is changed into enum type -Xfar_jump=<file> : Xfar_jump option(see your manual) -Xfar_jump <file> : Xfar_jump option(see your manual) -Xi : Xi option(see your manual) -Xj : Xj option(see your manual) -Xkt : Xkt option(see your manual) -Xk : Xk option(see your manual) -Xmask_reg : Xmask_reg option(see your manual) -Xm<num> : Xm option(see your manual) -Xno_word_bitop : Xno_word_bitop option(see your manual) -Xpack=<num> : Xpack option(see your manual) -Xpro_epi_runtime[=(on|off)] : Xpro_epi_runtime option(see your manual) -Xr : Xr option(see your manual) -Xsconst[=num] : Xsconst option(see your manual) -Xsec_file=<file> : Xsec_file option(see your manual) -Xv850patch : Xv850patch option(see your manual) -Xword_switch : Xword_switch option(see your manual) -ansi : pedantic compilation option -a : make assemble list, output to '.v' file -cc78k : extended specification (78k migration) -cpu <cpuname> : CPU name of device file -cnv850e : create V850E core common object file -cnv850e2 : create V850E2 core common object file -cn : create common object file -c : produce '.o' file. do not run ld -devpath=<path> : device file directory -err_file=<file> : output error and warning to file +err_file=<file> : append error and warning to file -err_limit=<num> : set limit error number -g : generate extra information for symbolic debugger -help : print help message -l<lib> : read object library 'lib' -m : run source through frontend, output to '.ic' file -o <file> : set name of output file -reg<num> : register mode(22, 26 or 32) -r<num>=<sym> : reserve user register for external variable -temp=<dir> : create temporary files in 'dir' -t : enable trigraph -v : verbose mode -w[<num>|<item>] : control warning messages, default 'num' is 1 -R <startup> : replace startup module file @<file> : read command-file 'file' == OPTIMIZATION ITEM CHARACTER == b : do basic optimization d : do optimization in consideration of debugging g : do global optimization m : merge intermediate files s : do code size optimization t : do exec speed optimization == PHASE CHARACTER == p : preoptimizer o : global optimizer i : improver a : assembler l : link editor == STANDARD FILE SUFFIX == .a : object library .c : C source file .ic : intermediate language file .o : object file .s : assembler source file .c2s: assembler source file == =================== == |
�i�Q�O�O�W�N�P�O���P�P���j
�����Z���T�̃o�O�������I������̂ŁA�{�i�I�Ƀv�����g��ō�邱�Ƃɂ��܂����B�@���i�_�������Ȃ����ɁA�����ʐϕ������̂ŁA���\�����Ƃ��Ă͗]�T���ł��܂����B�@�M�����͕\�ʂ̔z���i�������̓Z���T�ւ̐ڑ��j�ŒB���B�@�d���AGND�������ʂ��g���Ƃ����V���v���d�l�ɂł��܂����B�i���}�͕\�ʔz���ƕ\���������i�A���ʒu�j
���̓Z���T�́A�p�ԂɂȂ����H HDK ���̂��̂ŁA�U�s���p�b�P�[�W��MEMS�B�@�e�X�g�i�K�ŋC�ɂȂ����̂��A���̃Z���T�̒�R����B�@�z�C�[�g�X�g�[���u���b�W�ɂ���R����OPAMP�̍��������Ń}�C�R����A/D�R���o�[�^�ɐM�������Ē�R�̃o�����X�����ꂽ���Ƃ�d���Ō��o������@���̗p���Ă���̂ł����A�Z���T�ɂ���Ċ��x���قȂ��Č������̂ŁA������������A���̃Z���T�����̂S��R�̃Z���^�[������Ă���̂ł͂Ȃ����A�Ǝv���܂����B�@�����ŁA����̊�ł̓Z���T�̒�R�ɒ���ɔC�ӂ̒�R��������悤�ɂ��܂����B�@�ϒ�R�ł��悩�����̂ł����A�@�����A�A�ʐς�H���A�B���̐U���Œ�R���ς���Ă��܂�Ȃ����i��]���Ă��܂�Ȃ����j���s���A�Ƃ������ƂŁA���R�̂��̂����邱�Ƃɂ��܂����B
���ƁA�Z���T�ȊO�͂��ׂĕ\�ʑ��ɕ\�ʎ����ł��镔�i��I�т܂����B�@�Ƃ����̂��A���{�b�g�̑����Ƀy�^���Ɠ\��t����W��A���ʑ��ɏo�����肪����Ƒ����̃t���[���ɂ����������Ȃ��Ƃ����Ȃ�����ł��i���łɃt���[���ɂ͏d�ʒጸ�̂��߂̌��������Ă���̂ŁA�ʂ̈ʒu�Ɍ���������ƍ�����������j�B
�ꉞ�A����܂ł̌o������A�@���i�̔����A�A�l�W�̔����A�����ăv�����g��������̎葱���A�Ƃ������ԂɂĐi�߂邱�ƂƂ��܂��B
 |
�i�Q�O�O�W�N�P�O���P�X���j
�����Z���T�[�{�[�h�̕��i�ނ���ʂ�͂��܂����B�@LSI �� RS�R���|�[�l���c�B�@�R�l�N�^�̓��[�J���́B�@�\�ʎ����`�b�v�^��R�Ɨe�ʑf�q�͎������Ƀ^�_�ł��炦����̂𗘗p�B�@����ŏo�������ł��B
�T�u�}�C�R���Ƃ��Ă� V850ES �{�[�h������ɃV�������N�B�@36.8mm x 34.3mm�B�@�������A�O���o�X�̃s���͊O���܂����B�@���{�b�g�ɓ��ڂ��邱�Ƃ��l����ƁA�@SRAM���݂�����Ȃ�A�����{�[�h��ōs�������A�A�O��RAM�͓��ڂ��Ȃ��A�̂����ꂩ�Ɣ��f���Ă̊����B�@�����Z���T�[�{�[�h�Ɩʕt�����Ĕ������邱�Ƃ��������B�@�܂��y�n������̂Ŏq�{�[�h�i�ϊ��{�[�h�j�ȂǍ���Ă��������ȁB�@�i���������āA�{�[�h�쐬�̑�����������W�܂�̂ł��傤���B�j
 |
�i�Q�O�O�W�N�P�P���P���j
�@���̂�����ŗǂ����ȁH�@�����A�����I�@��T�C�Y�͖� 100mm x 80mm �� Eagle �t���[�łł̍ő�T�C�Y�B�@���������́A���ەK�v�Ȃ̂͂Q���Ȃ̂ł����A�P��������̒P�����T�`���Ă������ȂU���i�U���ł��A�Q���ł����z�͂قƂ�Ǔ����j�B�@�����͂Q���������ȁH�@�o���O�ɔ������đ��v��������ƐS�z�B�B�B
 |
����F�T�u�b�o�t�{�[�h�A������F�J�����p�A�_�v�^�A�����F�T�u�b�o�t�⏕�{�[�h�A�E�F�����Z���T�p�{�[�h�B
�T�u�b�o�t�⏕�{�[�h�́A�����p�A���v�ƁA�d���Ď��p����OPAMP�ƁA�X�̃R�l�N�^�p�[�q�B
�i�Q�O�O�W�N�P�P���S���j
������ɍۂ��āA���C�A�E�g���������܂����B�@�܂��AV�J�b�g�͊�̂P�ӂ���Εӂ܂Œʂ��Ȃ��Ƃ����Ȃ��A�Ƃ����d�l�������Ƃ��Ă��܂����B�@�ʕt�C���[�W�͕ς����Ȃ��̂ŁA�~�V���ڎw��ɕύX���Ă݂܂����i���11/4�C���[�W���X�V���܂����j�B
�i�Q�O�O�W�N�P�P���W���j
HOSv4 �� V850ES�ł��X�V���܂����B�@�����HOS�̃��C�u���������镔�����܂߂āA���ׂ�PM+(���[�J�[�����̓������j��Ő����ł���悤�ɂ��܂����B
�i�Q�O�O�W�N�P�P���X���j
P�ǂ��ƃR���̃���
�E�@Eagle �Ń��C�A�E�g����������ꍇ�A�����Ȍ덷��������
�E�@0.127mm �ȉ��ƂȂ�ƁA�т����肷��lj��������������邽�߁A�v�i�K�ł́A��L�덷���l�������C�A�E�g�K�v�B
�E�@�ׂ��p�^�[���ƃr�A�ԁA�ׂ��p�^�[���ƐM�����ŃG���[���قƂ�ǁB�@���̂��߁A�ׂ��p�^�[����
clearance �� 0.13mm �Ƃ���Ɖ���ł���\���������B�@
�i�Q�O�O�W�N�P�P���P�Q���j
�k�Ă̏o������߂��Ă��܂����B�@�o������ P�h�b�g�R�����烁�[�����A�s����C���B
HOSv4 for V850ES�łł����A�Q�傫���C���A�lj����܂����B�@�P�́A���d�����݂ɂ�����s��C���A�����P�́AOS�^�C�}��16�r�b�g�^�C�}��TMM���g�킸�A���v�^�C�}�ɂ��C���^�[�o���^�C�}�����݂��������s�����̂ł��B
�i�Q�O�O�W�N�P�P���Q�R���j
�������Ă�������͂��܂����B�@�N���N�n�ɗV�Ԃ������Ⴊ�������A�Ƃ����Ƃ���ł��B�@������ƃ_�C�I�[�h�̔��c�t�����Ȃ����Ă��܂��Ă܂����A���v���ȁH�@�߃J�b�g�����̓~�����O���ƒlj����������ǁA�~�V���ڎw��ɂ����̂ŁA��������J�b�g���Ă��炦�܂����B�@������܂����B
�~�V���ڂ̂Ȃ��ڂ͎c�������������̂Ŋ���R�Ȃ�ɋȂ��邾���ŕ����ł��܂����B�@���̂��ƁA�ܐ�ƌy���₷���������Ƃ������Ƃł�������ł�������B
 |
 |
35mm x 37mm �̊�� V850ES �𓋍ڂ��Ă݂܂����B�@���{�b�g��p�i��j�Ƃ������ƂŁA�s�v�ȃs�����폜���Đv�����̂ŁA�O��̂��̂����X�ɏ������Ȃ��Ă܂��B�@�d���{�����A���v�{�d���d���Ď����𓋍ڂ����x�[�X�{�[�h�ƁA�����Z���T�{�[�h�̂R���P�ō�����̂ő��z�͂���Ȃ�ł����A1������͔��Ɉ����d�オ��܂����B�@�����Z���T�͂����Ɠ��삷�邩�H�����A�����̑����t���[���ɂ҂����荇�����H���s���B�B�B
���ƁA�ŋ߁A���{�b�g�r���_�[�̃z�[���y�[�W�X�V���n�[�h�I�Șb�肪���Ȃ��Ȃ�܂����ˁB�@���[�J�[����̓w�͂̌��ʂ��Ǝv���܂����A������Ǝ₵�������ł��B�@���ۂɑ��c���邱�ƁA�C�x���g�ɎQ�����邱�Ƃ̑O�ɁA����y�����̂Ƃ��낪�����Ɨւ��L����A�Ǝv���������̍��ł��B�@���̒��ł��AONO����̓d�]�ǐV����AROBO-ONE �D���҂�Dr.GIY�����̂悤�ɐ���L�������J�����Ă���Ƃ����A�M�������̂悤�ɐ����̔����s�������̕��������J�����Ă���悤�ȃT�C�g�������Ƃ����Ƒ�����Ɗy�����̂ł��ˁB�i�����͑S�R�X�V���Ă��Ȃ��̂ł����B�B�B�j�@���̃��{�b�g�r���_�[�̊F����A�����܂��傤�I�@�i�����ƕs�������炱���A���R�ɂȂ鎞�Ԃ͑����Ă���͂��B�j
�i�Q�O�O�W�N�P�Q���R���j
�V�������̍D���Ȏ���newlib���N���ɍX�V�����̂�҂��Ă����̂ł����A�Ȃ��Ȃ� download�y�[�W(newlib�̍��ɂ��郊���N�̂��Ɓj�ɃA�i�E���X������Ȃ��̂ŁA�T���Ă��܂����B�@����ƁANews �̂Ƃ���� v1.17.0 �� 2008/12/22 �� released! �Ƃ���ł͂Ȃ��ł����I�@�����ANews -> Newlib Version 1.17 -> newlib project �ƃ����N�����ǂ��āA�匳�� ftp �T�C�g�������܂����B�@�Ȃ�قǁA����͂���������悢�킯�ˁB�B�B�@�Ƃ������ƂŁA�_�E�����[�h�����B
SEMB1200A, V850E(S), SH2 �Ȃǂ̊��p�ɍ\�z�J�n�ł��B
�i�Q�O�O�W�N�P�Q���Q�U���j
�����܂��Ă��߂łƂ��������܂��B�@���N����낵�����˂������܂��B
�N�n�߂���p�\�R���̒��q�������̂ł��B�@�d������ꂽ��A�s�R���Ɖ�������BIOS�������オ���ʂ��ł�͂��Ȃ̂ł����A�s�R�Ƃ���������łȂ��B�@�d�����ア�̂��Ȃ��B�B�B�Ǝv���ADVD�h���C�u���P��O���Ă݂���A�N�������B�B�B�@���ɂ��������肻���ȁB�B�B���܂������̂ł��B
��N���s�����P�N��U��Ԃ邱�ƁA�V�N�̕����������Ă��������Ǝv���܂��B
�i��N��U��Ԃ��Ă݂�Ɓi��N�̖ڕW�ɑ��āj�j
�E�@�v�����X�V�����Ȃ��B�i�Q�N�A���j
�E�@���ǁA��ف[�AROBO-ONE�Q���ł��Ȃ������B
�E�@RTOS �� HOSv4 �ɂ��ẮASEMB1200A�ւ̎�����B���B�@V850E(S) ���ł����B�@����͍��i�_�����������B
�i�ڕW�ȊO�j
�E�@�X�ɂ������g���Ă���悤�ȁB�B�B
�i���N�̗\��j
�E�@�֓����{�b�g���K��ɎQ������i���S�ɂ������Ă݂悤�j
�@�@- JiGoRoHP �𐬒�������i�j
�E�@���K�����ȊO�́A��邱�Ƃ��i���čL���Ȃ��B
�@�@- RTOS HOSv4 �֘A
�G���f�ڂ������̕��ɍD�]���������������Ɗ��ӂ�2008�N�B�@2009�N�͍X�Ȃ���̂P�N�ɂ������ł��ˁB
�i�Q�O�O�X�N�P���Q���j
Hide-i �����̋^��ɂ������ł��邩�B�B�B�܂��͊ȒP�ɍ���Ă݂܂����B�@�^��_��A������������A�X�V���܂��ˁB
Eagle �ł̖ʕt���̕��@���Љ�܂��B�@���p���������B�@���ӓ_�́A��R�f�q�Ȃǂ̘A�Ԃ��p������Ȃ����Ƃł��B�@���Ƃ��A���A, ���B �œ��� R1 �Ƃ�����R���ʕ������g�����ꍇ�A���A���Ɋ��B����ʕt�����ꍇ�A���A �� R1 �͂��̂܂g���܂����A���B �� R1 �͊��A �Ŏg���Ă��Ȃ� R?? �Ƃ��ēo�^����܂��B�@����ɂ��Ƃ��A���A �� R1 �` R12 �܂Ŏg���Ă��āA���B �ł� R1�`R10 ���g���Ă���ꍇ�́A���B ��ʕt�����ꍇ�AR13�`R22 �ɔԍ����ēx���Ȃ�������Ă��܂��Ƃ������Ƃł��B�@�ꌏ�A�ǂ������ł����A�������A���Q�ʍ�낤�Ɩʕt�����ꍇ�A���A �Ɋ��A����܂����A�Q�߂̊��A �̒�R�ԍ��� R13�`R24 �ɂȂ�A�Ƃ������Ƃł��B�@�����f�[�^�̖ʕt���ŕ������ɂ������ꍇ�́A���ʕ������e�L�X�g�����ŏ����Ȃ������@���炢�����v�������т܂���B�B�B�@���A, ���B �ŏd�˂����Ȃ��ꍇ�́A���炩���ߒ�R���������A, B �ŁA���ꂼ�� RAnn, RBnn �Ƃ��Ă����Δԍ��͏d�Ȃ�܂���B
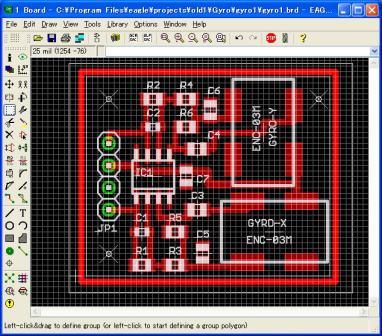 |
�@���_���̃A�C�R��(Group) �� �@��S�̂̃f�[�^��I���B �@���̂Ƃ��A�����������Ă��܂��̂��A �@�\�����Ƃ��ĕK�v�Ȃ��̂� �@�����Ă��܂��Ă���ƁA�̈�I������ �@�R��Ă��܂��܂��̂ŁADisplay �� �@�K�v�ȏ��͏o���Ă��������B �@�܂��AGND�Ȃǂ̃x�^�p�^�[������� �@�O�g���̈�I���̍ۂɓ���Ă��������ˁB |
 |
�A�͂��݃A�C�R���iCUT) �� �@�@�I�������̈�� CUT ���Ă��������B �@�@�I�������̈�̏�ʼnE�N���b�N�ł��B �@�@Microsoft �I�ȕ\���ł̓N���b�v�{�[�h�� �@�@COPY �����@�\���A �@�@Eagle �ł� CUT �ł��B |
 |
�B�V�K�̃{�[�h�f�[�^��� �@�@���сH�A�C�R���iPaste�j���s���܂��B �@�@��H�}�������N����Ă��Ȃ��{�[�h�f�[�^�� �@�@�ꍇ�́A����{�[�h�f�[�^��ł��\�ł��B |
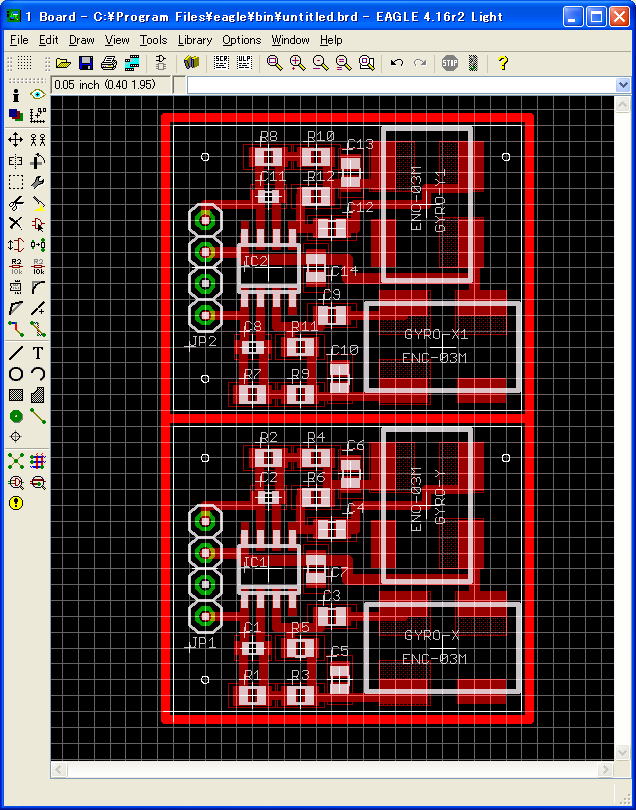 |
�B�f�����{�[�h�f�[�^���Q�� �@�@�\��t�����ꍇ�ł��B �@�@�R���f���T���R�̎��ʕ������A�Ԃ� �@�@�Ȃ��Ă���l�q���킩��܂��ˁB �@�@����Ɉ�a���������܂��B�B�B |
�i�Q�O�O�X�N�P���X���j
�����ONO-ONE �ł����B�@���肪�Ƃ��������܂��B�@�� denno_ono ����
Eagle �Ŗʕt�ł����Ƃ���ŁA���ɂ�肽���Ȃ�̂��AV cut �Ȃǂ̃{�[�h�f�[�^�Ԃ̐ؒf�����K�[�o�f�[�^�ɗ��Ƃ������Ƃ������ƁB
P�ǂ��ƃR���œ���ł��� Eagle �̃K�[�o�f�[�^�ϊ� CAM ����� V CUT ���������Ă݂��̂��A�R���ł��B�@P�łǂ��ƃR���ɔ�������Ƃ��ɂ��K�v�ȏ��ł��̂ŁA�g���q�ƈӖ��A�w������Ή��������\���L���Ă����܂��B�@�܂��A�K�[�o�f�[�^�̃`�F�b�N�ɂ́AGraphiCode �� GC-Prevue(�����g���C�A����) �������߂ł��B�@P�ǂ��ƃR���œ���ł���K�[�o�r���[�A�ł͑�������邢�̂����܂��\���ł��Ȃ����Ƃ�����̂ł����AGC-Prevue���Ƃ�����ł����B
| �g���q | ���� | �w���� | ���l |
| .cmp | ���i�ʃp�^�[�� | 1+17+18 | �@ |
| .plc | ���i�ʃV���N�f�[�^ | 21+25 | vector �t�H���g�� |
| .stc | ���i�ʃ��W�X�g�f�[�^ | 29 | �@ |
| .sol | ���c�ʃp�^�[�� | 16+17+18 | �@ |
| .pls | ���c�ʃV���N�f�[�^ | 22+26 | vector �t�H���g�� |
| .sts | ���c�ʃ��W�X�g�p�^�[�� | 30 | �@ |
| .out | ��O�` | 20 | 0.2mm�� |
| .vct | �u�J�b�g | 46 | 0.5mm�� |
| .drd | �h�����f�[�^ | 44+45 | excellon.cam �ŏo�� |
| .dri | �h�������X�g | - | excellon.cam �ŏo�� |
���N�̌��Ӂi�����j�������i�����ԁH�j�������B
�܂��P�T�Ԃ������N�͎d�������Ă��܂��A�ƂĂ����܂����B�@�܂��A�g���܂݂ȃX�^�[�g�ŁA���N�P�N�̓��{�b�g��G��鎞�Ԃ����ɏ��Ȃ��M�d�ɂȂ肻���ł��B�@�ł���Ƃ��͏W�����Ă�������Ƃ�肽���A���������܂����B
�i2009�N1��10���j
�T�u�{�[�h�����グ�ɋ�킵�Ă��܂����B
�������A�Ȃ�Ƃ������ł������ł��i���T����o���Ȃ̂ɂ���Ȃ��Ƃ��Ă��Ă����̂��낤���B�@���t���b�V���Ǝ�����[�������Ă���̂ł����B�B�B�j�B
��킵�Ă��܂����̂́A�@�T�u�b�o�t�{�[�h�́A�����d�͂Ȃ��̂���Ȃ��Ă���Ƃ����v�����݁A�AGP2D12�̓��쎞�̏���d�����Â����Ă����A�AGP2D12��3.3V�ł����ɖ��͂Ȃ��Ƃ����v�����݁A�̂R�ł��B�@���ɁAGP2D12 �̎g�����ɂ��ẮA���������Ⴂ���Ă��܂����B�@�d���d����+4.5�`5.5V�������̂ł��ˁB�@3.3V�ł������Ă����̂ƁA�ǂ����ł����ƍL�������W�̋K�i��ǂƎv������ł������Ƃ����������x�点�Ă��܂��܂����B�@3.3V�ł����삵�Ă���̂ł����A���̏ꍇ�A����d���������悤�ł��i�������Ă��܂��A���̃f�o�C�X�����蓮�삵�Ȃ��̂ŁA�����o���^�C�~���O�ł����b�V���J�����g�͌��\�傫���̂ł��傤�ˁj�B
��́AGP2D12 �̏o�͂�3.3V�����\���������݂����Ȃ̂ŁA�d������5V�ɕύX���A���b�V���J�����g��Ƃ��āAGP2D12
���� 100uF���x�̃R���f���T�����邱�ƁA�Ƃ��܂��B
�i2009�N1��24���j
�p�p�����Ă���́H�@���{�b�g�̏C���H
�܂��A���̂�����������B�B�B
����ł͂����Ȃ��B�@���낻��{�i�I�ɓ������Ă݂邩�B
�i2009�N2��25���j
������� V850ES �}�C�R���̕������Ƃ��č���Ă݂܂����i�����N���b�N�j�B�@RC PROPO �� 4ch PWM �M�����������āA4��PWM�M��������Ƃ����P���Ȃ��́B�@���ׂĊ����݂����ōs���Ă���̂ŁA���C���v���O�����͎��R�ɂ����͂��ł��B�@�����A�������Ȃ̂ŁA�f�o�b�O���炵�Ă��܂���B�B�B�������炸�B�@�o�O�����ΏC���͂��܂����A�\�t�g�̎g�����A�n�[�h�v�A�g�p�����ۂ̃n�[�h�̌̏�A�g���u���ȂLj�ؐӔC���܂���̂ŁA���[�U�̊F����ŕ��p�Ƃ��Ďg���Ă���������Ǝv���܂��B
�i2009�N3��7���E���̂P)
�����Z���T�����̉�H���A�قڌ��܂����̂ŁA�T�v�����J���܂��i���܂������肪�o�O���Ă����̂��悤�₭�쏜�ł��܂����j�B�@�U��Ԃ��Ă݂�A��N�̂W�����炱�����Ă�B�B�B
 |
�k���d�C�H�����������t�H�[�X�Z���T��㗝�X�o�R�ōw�����悤�Ƃ����̂ł����A�����C�N���Ƃ̂��ƂŒf���Ă��܂����̂ŁA�Ƃ���m�l����킯�Ă��������܂����B�@���肪�Ƃ��������܂����B�@�i�܂���蒼�������̂ŁA�P�O�قǕ����Ăق����Ȃ��B�B�B�j
���̔����t�H�[�X�Z���T�́A�z�C�[�g�X�g�[���u���b�W��H�̂悤�ȍ\���ɂȂ��Ă��邽�߁A�C���X�c�������e�[�V�����A���v�Ƃ��������ŁA�������������ĐM���邱�Ƃɂ��܂����B�@���̓C���s�[�_���X���C�ɂȂ�ꍇ�́A��������
OPAMP ��lj������H������܂����A���̌��ʂ͂��܂�Ȃ������̂ŁA����̓V���v���ɂP�̃Z���T�ɂR��OPAMP�̉�H�܂łƂ��܂����B�@���̓d���M�����AAREF=+3.3V�Ƃ���78K0/9222
�ɂ�A/D�ϊ����A�S��ϕ����s�����ƂƂ��܂����B�@�}�C�R����78K0��ICS2.0�M�����������邱�ƂƁA�����Ɉ��蓮�삳���邽�߂�+5V�d���œ��삳���邱�ƂƂ������߁A�A�i���O���̐M���d���Ƃ킯�邱�Ƃɂ��܂����B
 |
���ʁA��ʼn����������̐M���g�`�Ȃ̂ŁA���܂�Ӗ��͂���܂��A�e�Z���T�̂O�_�ƂȂ�ŏ��l�����肵�Ă��āA�����������ɂ悢���Ƃ��킩��܂����B�@���Ƃ́A���{�b�g�ɓ��ڂ��邾���Ȃ̂ł����A���̏ꍇ�A�����уg���N����������ƁA�����Z���T�̈Ӗ����Ȃ��Ȃ��Ă��܂������Ȃ̂ŁA�u�|�n�v�̗v�̂ő����уg���N���Ȃ��Ă���������s���������A�����Z���T��I�m�ɓǂݎ���悤�ɂ������Ǝv���܂��B�@ZMP�𒊏o���邱�Ƃ��ł���͂��Ȃ̂ŁA�s���n��A�����̏Ռ���������Ă�������悤�ȃ��{�b�g�ɂȂ��Ȃ����A�Ɗ��҂��Ă��܂��B�@�����A�����ƃg���N�������Ă����̂ł́A�����Ƃ������ȓ���ɂȂ肻���Ȃ̂ŁA���n����d�S�����܂ł̊Ԃ����g���N��������ZMP���o���s���A�d�S������A�Ƃ킩������A�����Ɨ��_�l�Ƃ̍������瑫���ъp�x�����肵�I�t�Z�b�g��������悤�Ȃ��Ƃ��ł�������̂��ȁH�ƃC���[�W���Ă��܂��B�@�C���[�W�����ł����ǂˁB
�i2009�N3��7���E����2)
���낻��z�[���y�[�W�̒��g�����Ȃ��Ƃ����Ȃ��Ȃ��A�Ɗ����Ă��܂����i�T�[�o�̏�����Ă��܂����j�B
�e�L�X�g���ł���A�Ȃ�Ƃ��NjL�ł������Ȃ̂ŁA���������ȃl�^�����c���Ă����܂��B
������NEC�G���N�g���j�N�X����16bit�}�C�R��78K0R�̃R���p�C���I�v�V�����ɂ��Ăł��B�@���̗ނ̃l�^�������ƁA���邱�Ƃ����Ă���̂ł����A�ł��Ă�����J�Ƃ������ƂŁB�@���Ȃ݂ɁA�^�[�Q�b�g�Ƃ��Ă���J���{�[�h�͎s�̕i��QB-78K0RKG3-TB�Ƃ��܂����B
| RA78K0R |
78K0R Assembler W1.31 [19 Aug 2008]
Copyright(C) NEC Electronics Corporation 2006,2008
usage : ra78k0r [option[...]] input-file [option[...]]
The option is as follows ([] means omissible).
-cx :Select target chip. ( x = f1166a0 etc. ) *Must be specified.
-o[file]/-no :Create the object module file [with the specified name] / Not.
-e[file]/-ne :Create the error list file [with the specified name] / Not.
-p[file]/-np :Create the print file [with the specified name] / Not.
-ka/-nka :Output the assemble list to print file / Not.
-ks/-nks :Output the symbol table list to print file / Not.
-kx/-nkx :Output the cross reference list to print file / Not.
-lw[width] :Specify print file columns per line.
-ll[length] :Specify print file lines per page.
-lf/-nlf :Add Form Feed at end of print file / Not.
-lt[n] :Expand TAB character for print file(n=1 to 8)/ Not expand(n=0).
-lhstring :Print list header with the specified string.
-g/-ng :Output debug information to object file / Not.
-j/-nj :Create object file if fatal error occurred / Not.
-idirectory :Set include search path.
-tdirectory :Set temporary directory.
-ydirectory :Set device file search path.
-ffile :Input option or source module file name from specified file.
-ga/-nga :Output assembler source debug information to object file / Not.
-dname[=data][,name[=data][...]] :Define name [with data].
-common :Create the common object module file for 78K0R.
-self :Use Self-programming.
-zs/-ze/-zn :Change source regulation.
-zs:SJIS code usable in comment.
-ze:EUC code usable in comment.
-zn:no multibyte code in comment.
-compati/-ncompati:Use macro for DIVUW,ROR4,ROL4,ADJBA,ADJBS,CALLF,DBNZ / Not.
-- :Show this message.
DEFAULT ASSIGNMENT:
-o -ne -p -ka -nks -nkx -lw132 -ll0 -nlf -lt8 -g -nj -ga
|
| CC78K0R |
78K0R C Compiler W2.10 [ 8 Jul 2008]
Copyright(C) NEC Electronics Corporation 2006,2008
Usage : CC78K0R [option[...]] input-file [option[...]]
The option is as follows ([] means omissible, ... means repeat).
<Preprocessor>
-dname[=data][,name[=data]]...
: Define name with data.
-uname[,name]...
: Undefine name.
-idirectory[,directory]...
: Set include search path.
<Memory Arrangement>
-cx : Select target chip. ( x = chip name ) *Must be specified.
-mx : Memory model (default : x = m)
x = s : Small memory model
x = m : Medium memory model
x = l : Large memory model
-mi[n] : Select allocation of MIRRORP segment. (n = 0, 1)
(default : n = 0)
-mafile[ -mafile]
-mafile[,file]
: Specify variable and function information file.
-rx/nr : Control data arrengement / Not.
x = d : assign external variable to SADDR area (all)
x = dn: assign external variable to SADDR area till n byte
(n = 1, 2, 4)
x = dm: assign external variable to SADDR area
structure, union and array
x = s : assign local static variable to SADDR area (all)
x = sn: assign local static variable to SADDR area
till n byte (n = 1, 2, 4)
x = sm: assign local static variable to SADDR area
structure, union and array
x = b : assign bit field from MSB
x = c : packing structure members
x = a : suppress indirect word access
x = f : assign ROM data to far area
x = n : assign ROM data to near area
<Optimization>
-q[z]/nq : Optimize output code / Not. (default : z = cjlvw)
z = x[n] : max. optimization (default n = 2)
n = 1 : optimize object speed (z = cjvw)
n = 2 : default (z = cjlvw)
n = 3 : optimize object size (z = cjl3vw)
z = c : assign char variable without sign expand
z = u : change plain char to unsigned char
z = r[n]: use SADDR area for norec & register variable
(default : n = 2)
n = 1 : norec parameter & auto variable
n = 2 : n = 1 & register variable
z = v : automatic allocation of the register variable
z = j : jump optimization
z = l[n]: optimize object size (default : n = 1)
n = 1 - 3 : size is smaller as n is to 3,
but speed is slowly
z = w : aggressive optimization
z = g : optimization debugging
z = t : generate relative branch table for switch
<Debugging>
-g[n]/ng : Output debugging information / Not. (default : n = 2)
n = 1 : to .rel only
n = 2 : to both .asm and .rel
<Output Files>
-o[file]/no : Create the object file / Not.
(default : file = input file primary name)
-a[file]/na : Create the assembler source file / Not.
(default : file = input file primary name)
-sa[file]/nsa : Create the assembler source file with the C source / Not.
(default : file = input file primary name)
-li/nli : Output included source to the assembler source comment / Not.
-e[file]/ne : Create the error list file / Not.
(default : file = input file primary name)
-se[file]/nse : Create the error list file with the C source / Not.
(default : file = input file primary name)
-x[file]/nx : Create the cross reference list file / Not.
(default : file = input file primary name)
-lw[width] : Specify list file columns per line. (width = 72 to 132)
(default : width = 132)
-ll[length] : Specify list file lines per page. (length = 0, 20 to 65535)
0 means no paging. (default : length = 0)
-lt[n] : Expand TAB character for list file. (n = 1 to 8)
Not expand. (n = 0) (default : n = 8)
-lf/nlf : Add Form Feed at end of list file / Not.
-p[file]/np : Create the preprocess list file / Not.
(default : file = input file primary name)
-k[y]/nk : Specified preprocess list mode / None. (default : y = fln)
y = c : delete comment
y = d : execute #define
y = f : execute #if, #ifdef, #ifndef
y = i : execute #include
y = l : execute #line
y = n : add line number and paging
<Miscellaneous>
-zy/-nz : Change source regulation / Not.
y = a : disable extensions (ANSI standard only)
y = f : output the object for flash memory
y = p : enable C++ comment, ignore from // till end of line
y = c : comment can nest
y = s : SJIS code usable in comment
y = e : EUC code usable in comment
y = n : no multibyte code in comment
y = b : not expand argument and return value
-ztaddress : Specify start address of flash area branch table.
-zzaddress : Specify start address of flash area.
-v/nv : Verbose compile messages / Not.
-w[n] : Change warning level. (n = 0 to 2) (default : n = 1)
-tdirectory : Set temporary directory
-ffile : Input option or source file name from specified file.
-ydirectory : Set device file search path.
-- : show this message.
-? : show this message.
-h : show this message.
DEFAULT ASSIGNMENT
: -o -g -qcjlvw -lw132 -ll0 -lt8 -w1 |
�i�Q�O�O�X�N�S���X���j
�ߓ��Ȋw����A�l�i�A�g���N�Ƃ��ɍ����T�[�{KRS-6000�䂪���������݂����ł��ˁB�@�P�W��l�����p���p�ӂ���Ă���Ƃ���ȂA�������ł��ˁB�@�����ƁA�ؔ��������ɓ����Ă�̂ł��傤�i��k�ł��j�B�@LiPO��5500mAh �Ƃ������̂��o�Ă܂��̂ŁA�܂��܂���d������ɓ����Ă��������ł��ˁB�@�Ɠd���i�ƊE�ő�^�̂��̂����̂́A�����肿����Ə��������̂邽�߂̉a���ƕ��������Ƃ�����܂��B�@���̃T�[�{�͂ǂ������Ƃ�����^�[�Q�b�g�ɂ��Ă���̂��낤�B�B�B�i�ƁAKRS-4014 ���o�����������܂������A���ǎ嗬�ɂȂ��Ă�̂ŁAKRS-6xxx �����R�ƈڍs���Ă�����ł��傤���B�j
78K0R/KG3 �ŒʐM�����̃v���O�������쐬�B�@�����ݏ����Ȃ��ŒʐM���������������̂ł����AApplilet2 �� UsersManual ���Ɗ����ݑO��ŋL�ڂ���Ă��邽�߁A�����ݒ�Ȃǂ���t���X�N���b�`���Ă݂܂����B�@SAU(Serial Array Unit) �ɂ�� UART �����Ƃ��������Ȃ̂ŁASAU �̃`�����l�����ɁA�ݒ������Ƃ������Ƃ����X�ʓ|���ȁA�Ɗ����܂����B�@�����ƁA�����̎d�l�ύX�ȂǂɒǏ]���₷���悤�Ƀp�����[�^����������낤�A�Ǝv���܂����B�@����������ƁA�ߓ��Ȋw�T�[�{��ICS2�Ȃǂ͌��\�ȒP�ɑΉ��ł������ȋC�����܂����B�i�ł�����ASAU�̃`�����l�����A�܂�8�|�[�g�������Ă��邱�ƂɂȂ�̂ŁASEMB1200A�Ɠ����悤�Ɏg�������ł��B�@�O�[�O�����Œ��ׂĂ��Ȃ��Ȃ� 78K0R �֘A�̋L�����Ȃ��̂ŁA�\�[�X�R�[�h�����L�Ɏ����Ă����܂��B�@�����ԈႢ������܂�����A���w�E����������Ə�����܂��B�@����̏ꍇ�AUART2(SAU10=TxD2,SAU11=RxD2) ���g���Ă��܂��B
/* -------------------------------------------------------------------------- */
/* - UART2 �ɂP�������M - */
/* -------------------------------------------------------------------------- */
void uart2_putc(
uint8 x
)
{
#if 1 /* ���s�������Q�������B�@�s�v�Ȃ�A1 -> 0 �� */
if( x == '\n' ) {
while( (SSR10 & 0x0020) != 0 ) ;
TXD2 = '\r';
}
#endif
while( (SSR10 & 0x0020) != 0 ) ;
TXD2 = x;
}
/* -------------------------------------------------------------------------- */
/* - UART2 ���P������M - */
/* -------------------------------------------------------------------------- */
uint8 uart2_getc( void )
{
uint8 rxd;
while( (SSR11 & 0x0020) == 0 ) ;
rxd = RXD2;
return rxd;
}
/* -------------------------------------------------------------------------- */
/* - UART2 ������ - */
/* - Baudrate = 38400bps - */
/* - Character = 8 bit - */
/* - Parity = NONE - */
/* - Stop Bit = 1 bit - */
/* - ���@����M�ɂ����銄���ݏ����͎��{���Ȃ� - */
/* -------------------------------------------------------------------------- */
void init_UART2( void )
{
SAU1EN = 1; /* SAU1 clock supply */
NOP();
NOP();
NOP();
NOP();
SPS1 = 0x0022; /* CK11=CK10=fclk/(2^2)=5MHz */
/* UART2 initial setting */
ST1 |= 0b00000011; /* disable UART2 RxD and UART2 TxD */
SRMK2 = 1; /* disable interrupt of INTSR2 */
SREMK2 = 1; /* disable interrupt of INTSRE2 */
STMK2 = 1; /* disable interrupt of INTST2 */
SRIF2 = 0; /* clear interrupt-flag of INTSR2 */
SREIF2 = 0; /* clear interrupt-flag of INTSRE2 */
STIF2 = 0; /* clear interrupt-flag of INTST2 */
SIR11 = 0b00000111; /* clear Flaming-E/F, Parity-E/F, Overrun-E/F */
NFEN0 |= 0b00010000; /* noise filter on for UART2 RxD */
// RxD
SMR11 = 0x8122; /* CKS=1, CCS=0, STS=1, SIS=0, MD=UART */
SCR11 = 0x4097; /* RxD(TXE=0, RXE=1), 8N1, LSB-1st */
SDR11 = 0x8000; /* SDR[15:9]=64 -> 64 << 9 = 0x8000 */
// TxD
SMR10 = 0x0022; /* CKS=0, CCS=0, STS=0, SIS=0, MD=UART */
SCR10 = 0x8097; /* TxD(TXE=1, RXE=0), 8N1, LSB-1st */
SDR10 = 0x8000; /* SDR[15:9]=64 -> 64 << 9 = 0x8000 */
SO1 |= 0x0001; /* output level */
SOE1 |= 0x0001; /* enable UART2 output */
/* RXD2 pin setting */
PM14 |= 0x08;
/* TxD2 pin setting */
P14 |= 0x10;
PM14 &= ~0x10;
SS1 |= 0b00000011; /* enable UART2 RxD and UART2 TxD */
}
/* -------------------------------------------------------------------------- */
/* - CPU������ - */
/* -------------------------------------------------------------------------- */
void init_CPU( void )
{
OSTS = 0b00000111; /* 13.11msec. waiting (2^18/fx) */
CMC = 0b01000001; /* 20MHz, X1 mode, non-SubCLK */
MSTOP = 0; /* start external CLK with X1 */
while((OSTC & 0xFF) != 0xFF) ;
OSMC = 1; /* >10MHz */
CKC = 0b00111000; /* CSS=0, MCM0=1, fCLK=fMX */
HIOSTOP = 1; /* stop internal HighSpeed CLK */
XTSTOP = 1; /* stop SubCLK */
}
|
�i�Q�O�O�X�N�S���P�Q���j
78K0R/KG3 ��G���ĂR���ځB�@HOSv4 �́i��G�c�ɂł����j����m�F�܂łł��܂����B�@�e�튄���݂̃e�X�g�͍s���Ă��܂��A�^�X�N��ւ��͖��Ȃ��ł��Ă���悤�ł��B�@78K0,
78K0R �͂S�o���N�̃��W�X�^�\���ɂȂ��Ă���̂ł����A�����RTOS�ł͂ǂ̂悤�Ɉ����Ηǂ��̂��A�Y�݂ǂ���ł��B�@�����͂�����������Ă����Ƃ��āA�܂��́Asourceforge�ɓo�^�ł���悤�ɁA�h�L�������g������i�߂����Ǝv���܂��i�h�L�������g�͂Ȃ��Ă��ǂ��̂ŗ~�������A���[���������ˁj�B
�i�Q�O�O�X�N�S���P�Q���E���̂Q�j
78K0R�p HOSv4 �� sourceforge.jp �� CVS�œo�^���܂����B
���@����o�b�̒��q�������̂ŁA�T���͑傪����ȏC�����ȁH�@RAID-5 ���_���Ȃ̂��Ȃ��B�B�B
�i�Q�O�O�X�N�S���P�R���j
�����͉J�オ��ł������A�Ƒ��Ɩ��Ă���BBQ���Ă��܂����B�@�߂��̉͌��Œ����͂�B
��������PC�Ɠ����Ă����̂ł����A����PC�̕s�����������߂������ł��B�@�p�\�R���V���b�v�œd���e�ʂ�����Ȃ��Ƃ��AHDD�̏���d�͂��傫�����番�U������ׂ����Ƃ��A���܂����̂ŁA�Ƃ肠�����f���ɏ]���Ă݂邱�ƂɁB�@�܂��́A�d�����������łǂ����ȁH�Ǝv�����̂ł����A����ς�ˑR�p���[�_�E���B�@���ɁA�d���̌�����HDD����U80G�o�C�g�P�̂œ��삳���悤�Ƃ����̂ł����AWindowsXP�C���X�g�[�����ɁA�u���[�o�b�N�ɂȂ�����i���b�Z�[�W���������G�E�B���X�ɐN����Ă���\��������܂��Ƃ��B�B�B�j�ADVD�h���C�u�̓ǂݎ��Ɏ��s������i���Ԃ�A������E�B���X�Ɗ��Ⴂ���Ă�̂��u���[�o�b�N���b�Z�[�W�j�A�S�邽���ԁB�@�ӂƁA�v�����̂��ADVD�h���C�u��������Ȃ����H�ł��B�@�̎g���Ă����h���C�u�Ɍ���������A����Ȃ�AWindowsXP�̃C���X�g�[�������B�@�C��ǂ����āAHDD�����Ƃ�RAID-5��Ԃɖ߂��āA�S�h���C�u��B�@���̖����Ȃ��B�@DVD�h���C�u�����������ŁA�V�X�e�����S��������قǂ̃g���u�����āB�B�B�i�v�킸�̏��͂��������Ȃ�܂����j
���́A���K�ɓ����Ă��܂��B�@�Ƃ������ƂŁA3D-CAD �ŊG��`������A�v���O�����������̐������������܂����B
�Ƃ���ŁASISO�����BLOG�ŃR�����g���Ă����̂ł����A�H���ʏ�����ňȑO�����Ă������[�v���t�@�C���E�s���\�P�b�g�A�̔��ĊJ���Ă��܂��ˁB
�i�Q�O�O�X�N�S���P�W���j
78K0R �̃I�v�V�����E�o�C�g�ɂ��ă����ł��B
�n�[�h�E�F�A�E���[�U�[�Y�}�j���A����ARA78K0R �̃w���v�ɂ���̂ł����A������̂ɋ�J���܂����̂ŁA�������c���Ă����܂��B
RA78K0R(CC78K0R)�ł́A�I�v�V�����o�C�g�w��́A�Q�ʂ�ł���悤�ɂȂ��Ă܂��B�@�@�I�v�V�����o�C�g�R�[�h���L�ڂ����\�[�X���A�Z���u���`���ŋL�ڂ������Ƀr���h����B�@�A�����J�I�v�V�����ɂĎw�肷��B�@�@�A�A�̏ꍇ�A�A�̕����D��x���������ƂɂȂ�܂��̂ŁA���ӂ��K�v�ł��B�@���ɁAApplilet2
�ȂǂŃR�[�h�����������������ꍇ�A�����J�I�v�V�����������Ɏw�肳��Ă���ꍇ������܂��B
 |
����́A�I�v�V�����o�C�g�� RA78K0R(CC78K0R) �̃����J�I�v�V�����̐ݒ�A�o�͂Q�̉�ʂ̃n�[�h�R�s�[�ł��i�㔼�������j�B�@�Ԋە������I�v�V�����o�C�g�w�肷�邽�߂̓��͉ӏ��ł��B�@�����ł́A�I�v�V�����o�C�g�̍ŏ��̂R�o�C�g���w��ł��܂��i��L�w��́AWatchDogTimer���g�p���Ȃ��ꍇ�̗�ɂȂ�܂��j�B
�A HOSv4 �� hos4cfg �p�ɒT�����A������܂����B�@CC78K0R �� cpp (c preprocessoer) �����̏������s�����Ƃ��ł��Ȃ��悤�Ȃ̂ŁA�t���[�ŒP�Ɣz�z����Ă��� cpp �ł��B�@����ƁAmcpp �Ƃ����c�[���������܂����B�@����ɂ���āAhos4cfg �̑O�i������ mcpp system.cfg > system.i �����łł��Ă��܂���������̂ł��iPM+��ł̐ݒ��͉��L�̉�ʃR�s�[���Q�Ƃ��������j�B�@bcc55��cygwin, MinGW(msys)�ȂǃC���X�g�[�����Ă���Agcc��cpp������̂ł����AHOSv4 �ł� 78K0R�ł� V850E(S)�łƓ������ANEC Electronics���̖����� PM+����P�Ƃō�邱�Ƃ��\�Ȃ悤�ɂ����������̂ŁA�K�v�ɂȂ����Ƃ����킯�ł��B
 |
�i�Q�O�O�X�N�S���P�X���j
���T���A���悢�攭���ɂȂ�܂��AInterface���ʍ��� TECH-I 42���ŁA�Ă� V850ES/JG2 �̃��{�b�g����L�����Ăэڂ�܂��B�@���낢��Ȑ���L���������Ă܂��̂ŁATECH-I �͂��������H
 |
�i�Q�O�O�X�N�S���Q�Q���j
���Ɠ������o�b�s���������A�v�����������g���̐ΐ삳��B�@�����������B�@�c�u�c�h���C�u�����Ńp�\�R�������B�@���s��ł��傤���H�@�d���n�̃g���u���A�|���ł��ˁB
�i�Q�O�O�X�N�S���Q�T���j
JiGoRo3 �v���B
 |
�i�Q�O�O�X�N�S���Q�W���j
NEC Electronics ���̖����i�̓����� CubeSuite ���C���X�g�[�����Ă݂܂����B�@PM+�ɔ�ׂāA�����オ��Ɏ��Ԃ�������Ƃ������Ƃ������ẮAPM+���ŕs���Ɋ����Ă����Ƃ�������܂��d�グ�Ă���Ă��銴�������܂��B�@MPU�̕i�킪�����̂ŁA�����Ή��̂悤�ł����AMPU�̃s���R�l�\�Ȃǂ��o�Ă���̂́A���[�U�[�Y�}�j���A����T����Ԃ��Ȃ��Ă����ǂ��@�\�Ɏv���܂��B�@���̂�����A���[�U�[�ɉ�����Ă����A���������Ă�����ł����A���[�J�[�i������Ȃ��Ȃ����R�Ɏd�l�����J���Ă���Ȃ��̂ł��傤�ˁA�����ƁB�B�B
 |
CubeSuite �̂������Ƃ���́A�]���̓������̃v���W�F�N�g�t�@�C�������̂܂ܗ��p�ł��邱�Ƃł��ˁB�@���ȍ~�̂��߂̎葱���͂��ׂă\�t�g������Ă����A������O�̂��Ƃ����Ă����̂����ꂵ���ł��B�@V850E(S), 78K0R �ɈڐA���� RTOS �� HOSv4(HyperOS uITRON4.0) �̃��C�u�����\�z�A�J���������̂܂g���܂����̂ŁA���ɁACubeSuite�p�̃v���W�F�N�g�t�@�C����Y�t���Ȃ��Ă��悳�����ł��B
�i�Q�O�O�X�N�T���P���j
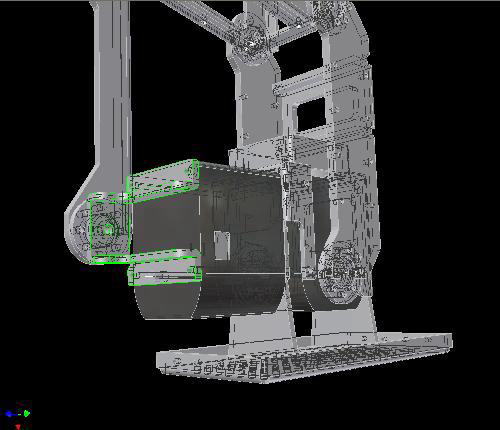
JiGoRo3�p�ɕ��s�����N�̋r�����l���Ă܂��B�@�����ѕ����̎��R�x�𑝂��Ƃ������Ƃ��l����ƁA��ː_���{�b�g��Neutrino-NERO���ƂĂ��ǂ��ł��Ă���ȁA�Ɗ��S���Ă��܂��܂����B�@����ߒ��̎ʐ^�ȂǎQ�l�ɂȂ�܂��B�@���{�v���`�������W�J�b�v�ŏ��D���Ƃ������͂��炵�Ă��A�����x�̍������킩��܂��ˁB�@���炵���ł��B�@�g�R�g�R�Ԗ삳���̃A�h�o�C�X��Y�ꂸ�Ɏd�グ�����ȂƎv���܂��B
�i�Q�O�O�X�N�T���Q���j
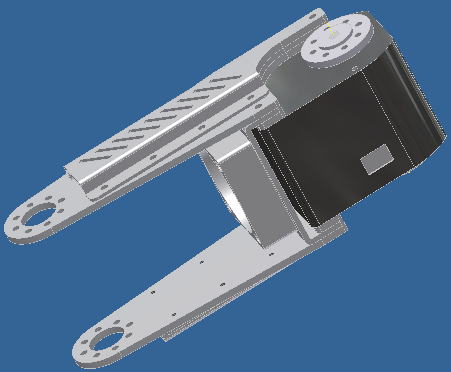
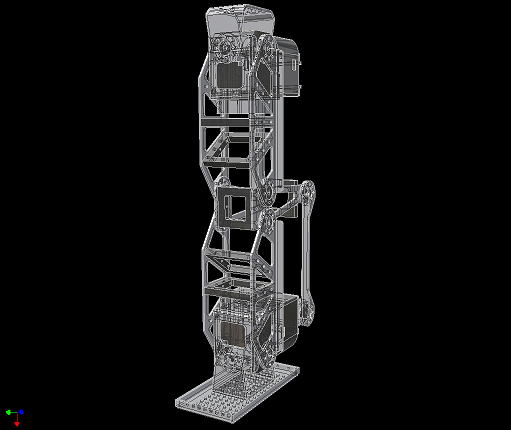
JiGoRo3 �̃{�f�B�����ƁA�]���̎��\�����x�[�X�Ɍy�ʉ������^�C�v�͍�抮�����܂����B�@����̂Ƃ���A���s�����N�̂��̂������ɍ�낤�ƍl���Ă�̂ł����A�Ȃ��Ȃ��܂Ƃ܂�܂���B�@�����Ƒ�X�I�ɕύX���Ȃ��Ƒʖڂ��Ȃ��B
 |
 |
�A���~�̔����H�����Ŏd�グ�悤�Ƃ��邩�����̂��ȁH�@�Ƃ肠�����A�����сH�����̃p�[�c�����͂���ł悢���낤�A�Ƃ������̂������B
�e�N�m���W�A�i���j���W���ɁA�H�t���Ń��{�b�g���V���b�v�Ƃ��ĊJ�X���邻���ȁB�@���E���{�b�g�����̓X�������{�b�g���V���b�v�̓X���ɏA�C���ꂽ�Ƃ��i�\���j�B�@�S�@��]�撣���Ăق����ł��ˁB�@���{�b�g�����̂v�����V���b�v�́A���܂ő��݂��Â���̂ł��傤���i�i���͔�����Ԃ̂܂܂ł����j�B
�i�Q�O�O�X�N�T���T���j
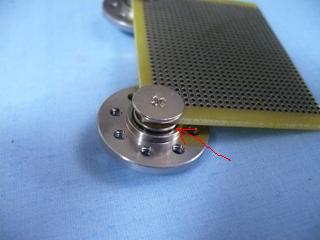
���傱���ƃl�^�B�@�ߓ��Ȋw���̃x�A�����O�t���T�[�{�z�[�����A���~�ɂ���ۂɉ�]��j�Q���Ȃ��悤�ɂ���A�C�e���ł��B
 |
 |
��̂Q�̎ʐ^�ō������������������B�@�����镽���b�V���[�B�@����M3�p�A�E��M2.6�p�ł��i���݂܂���A�B��p�x�������A�������@�Ɍ����܂��ˁj�B�@�O�`���@�́AM3�̓�7.6mm, 0.5mm���AM2.6�̓�7.2mm, 0.5mm���ł����i�����l�j�B�@���̂ق�̏����O�`���a�̍����|�C���g�ł��B�@M3�l�W�ł��AM2.6�p�̕����b�V���[���g����̂����a���قƂ�Ǖς��Ȃ����߂ł��B�@��̉E���̎ʐ^�́A�X���[�z�[����i1.6mm���j�ɃT�[�{�z�[�������Ă݂��Ƃ���ł��B�@�T�[�{�z�[���Ɗ�̊Ԃɕ����b�V���[������̂ł����A������M3�̕����b�V���[�A�E����M2.6�ł��B�@�g�債�Ă݂�Ƃ킩��̂ł����AM3�p�����b�V���[���ƃx�A�����O�̊O���i�t���[�z�[���ɌŒ肳�ꂽ���j�����S�ɂ������Ă��܂��̂ł����AM2.6�p���Ɣ����ɓ����ɐ��荞�ފ����Ńt�B�b�g���܂��B�@�������猩���ʐ^�����Ɏ����܂��B
 |
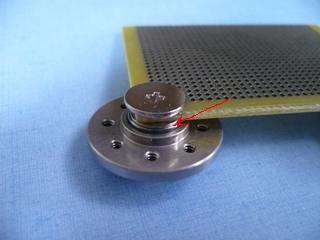 |
�����̎ʐ^��������M3�p�����b�V���[, �E����M2.6�p�����b�V���[�ł��B�@�t���[�z�[���Ɏ��t����ꂽ�x�A�����O�������Ȃ����ɑ��ĉE���������b�V���[�̊O���Ɍ�����̂��킩��܂��B�@��ʼnĂ݂�ƁA���͗�R�ł��B
���̔����H�ŁA�A���~��0.5mm�̍a���H���{���Ȃ��Ă��悢���Ƃ��킩�����̂ŁA���H�̎�ԁi��p���j���h���܂����B�@�����A�x�A�����O�̌������������@������Ȃ��Ƃ����܂��A0.5mm�������点�悢�̂ŁA���v�B
���j�����̕����b�V���[�ł����A��ʋK�i���ǂ������ׂĂ��܂���B�@�߂��̃z�[���Z���^�[�ōw���������̂ł��̂ŁA�����o���c�L�ȂNJ܂߂ĕK���ł��邩�ǂ����͓����͐ӔC�����˂܂��B
�i�Q�O�O�X�N�T���P�U���j
����ɑ����āA�H��l�^�B�@���s�������Ƃ��Ƀt���[�z�[�����Œ肷��l�W���C�ɂȂ�܂����B�@�l�W�����̃T�C�Y���ʏ�M3���ƃ�4mm���炢�ł����A����́A��9mm�ł��B�@�i�L�j��䐻�쏊�����̂Ƃ��납����肵�܂����B�@������g���ƃl�W�����̖ʐς��傫���̂ŁA�A���~�t���[���Ƀs�^���ƒ���t�������ŁA�����Ԃꂪ���P�ł��܂��B
 |
�����_�̑��\���B�@�`���Ε`���قǁA�C���[�W���炸��Ă���B�B�B
 |
�i�Q�O�O�X�N�T���P�W���j
ROBOSPOT �ɂ� POM ���H���J�n�Ƃ����̂������āA�������ς����肢���܂����B�@�v�����������߂��ȁH�Ƃ��v���܂������A���H�ɗv���鎞�Ԃ�Z���ł���悤�ɐv���H�v�����炢���̂ˁA�ƋC�����B�@���@�����܂߂Ă����������������Ĕ��������Ă����������Ƃɂ��悤�B�@Inventor �̃f�[�^���̂܂܂Ŏt���Ă����̂����ꂵ���ł��ˁB
�b�͕ς���āA�S������Ζ��̐����ς�����̂ŁA�Ƃł̉߂�������������Ă��܂����B�@���S���ɂ����āA���{�b�g�̂��Ƃ����ꂱ��l���Ă��璩�H�A�o�A�Ƃ����̂��蒅���Ă��܂����B�@���̎��ԑтɃ��[������Ƒ��肩��r�b�N���̃R�����g�������ł����A�����������Ƃł��B
���{�b�g�����A�����Ȃ�ł��ˁB�@���߂łƂ��������܂��A���ȁB�@�H�t���ɂ�������̃��{�b�g�W�̂��X���ł���̂͂��ꂵ�����Ƃł����A����������ƒl�i�������Ăق����Ȃ��B�B�B
�i�Q�O�O�X�N�T���Q�Q���j
�R���g���[���ɂ��āB�@Wii �����R���̉�͂����T�C�g���[�����Ă��܂��ˁB�@�V�����`�̃����R���Ȃ̂ŁA�Q�����s���{�b�g�Ŏg���Ƃ�����}�X�^�[���X���[�u�̍ۂɗ���ɂ����ē��������炢�ł��傤���i�Q���R���g���[�����g���Ȃ���ґ�ł����ǂˁj�B
���{�̃Q�[���@���C�O�ʼn�͂���Ă���Ă����̂��������ł��ˁB
�����܂ʼn�͂��I����Ă�A���ڂ͊ȒP�����Ȃ�ł����ǁA�ǂ������������Ȃ������Ȃ̂ŁA���삩�ȁH�@�܂��A�����܂Ŏ��Ԃ������肻���ł����ǁA��ł�����A������ł��B
�i�Q�O�O�X�N�T���Q�S���j
�{�`�{�`�ƐF�X�Ȃ��Ƃs���Ă���Ă��܂��B�@�L�����s�Ƃ����ƁA��łȂ��Ȃ�̂ŁA�ł����Ƃ���Ő������m�点(���J�j���Ă��������Ǝv���܂��B�@���̒��ł��A3D-CAD �Ń��{�b�g�̃C���[�W�������Ă����̂͊y�����ł��ˁB�@�����͂�����Ȃ��̂Łi�d�C��͂�����܂��ˁj�A���ꂱ�ꏑ���Ă��܂��܂��B�@�ł����A�����I�ɔ����H�ֈڂ낤�Ƃ���ƁA���������ăM�u�A�b�v�B�B�B�@���[��A���ł��������B�B�B�i�ǂ���������Ȃ����甃��Ȃ���`���������j
�i�Q�O�O�X�N�T���Q�V�� AM5:30�j
�V�}�P������ASEMB1200A �ɂ� malloc() ���g���������ǁA�Ƃ����A���������܂����B�@������Œ��ׂ������ł����A�����݊܂߂� non-OS ��Ԃł����ɖ��Ȃ������Ă��܂��B�@malloc(), realloc(), memalign(), free() �Ƃ��������̂��e�X�g���Ă��܂��B�@sbrk() �ɂă������̈���m�ۂ��Ă����Ă��̒��Ŏg���Ƃ����`�ł��B�@�V�}�P������͂����ƁA�������s��������Ă���������Ǝv���̂ŁA�����ƃe�X�g�v���O�������炢�Ȃ��̂ł͈���������Ȃ�����������N�����Ă��܂��Ă�낤�ȁA�Ǝv���܂��B�@�P�C�ɂȂ��Ă�̂́A�����ݏ����������ꍇ��������������A�Ƃ������ƁB�@���������āA�����ݏ����̕��� malloc() �Ń��������m�ۂ�������O�Ɏ��s���āANULL�|�C���^���Q�Ƃ��ɍs���Ă��܂��H
�i�Q�O�O�X�N�T���Q�V�� PM 7:10�j
SEMB1200A �l�^���o���Ƃ���ŁA�P�\���ł��B
�Ђ��т��Ƀ��C�u�������X�V���܂��B�@����܂Ńh�L�������g��typo�������ċ�̓I�ɃR�R�����������Ƃ�������Ă��Ȃ��̂ŁA�傫���d�l�͕ύX���Ȃ��\��ł��B�@���̂��Ƃ����ł̖ړI�ł��B
�@�@�@Ether 1port �̃T���v����Y�t�B�@�ǂ̂悤�ȃ��x���܂ŏ����ă����[�X����̂��ǂ��̂����n�Ȏ��ɂ͂킩��Ȃ����߁A�T���v���R�[�h�Ƃ��ēY�t����B�@��Ă�����[�����������B
�@�A�@inline ��`���폜���A���ʂȃR�[�h�� .bin �ɓ���Ȃ��悤�ɂ���B
�@�B�@HOSv4 �Ƃ̘A�g���Ƃ�B
����ȂƂ���ł��傤���B
�i���낻��A�y�[�W��V�������������ǂ��̂��ȁH�@����Ƃ��A�e�[�}���ɐ������������ǂ��̂��ȁH�H�H�j
�i�Q�O�O�X�N�T���R�O���j
JiGoRo3�̈ꕔ�p�[�c���d�オ���Ă��܂����B�@�P�����v�~�X���Ă��܂��Ă邱�Ƃ̋C���t���܂������A����͂ł������ł��B�@�悩�����A�悩�����B�@�S�̂̉��g�i�����j���T������X�^�[�g�ł��ˁB
�i�Q�O�O�X�N�U���T���j
��`���Ă����H��n�e�e�L�����y�[�����ł͂Ȃ��̂Ŋ��҂͂ł��܂��AROBOSPOT �� POM���H�˗������܂����B�@POM�ނ̐F���w�肪�ł��ėǂ������ł��i�[�i�܂ő҂����Ԃ��o�Ă��܂��܂����j�B�@����ŁAJiGoRo3 �̉��H�˗��͂قڊ����B�@���Ƃ́A�T�[�{�̃V���A���ԍ������Ȃ����ăv���O���~���O���Ȃ��������A�̃n�Y�B�@���̒����ȂǓ��͂��Ȃ��������œ����s�v�Z�v���O���������͕ύX���Ȃ��Ă������͂��Ȃ̂����B�B�B�@�Ƃ�Ԃ��������y�����̂����A��͂�ꔭ�œ����Ăق������̂ł��B
�i�Q�O�O�X�N�U���X���j
�A��������ʐM�@��������A���B�@�Ƃ��Ă��e�ȃt�H���[�����������āA����������܂��B�@���Ԃ������Ŕ����Ƃ����Ƃ���Ń��{�b�g�����s���Ă܂����A���ɔ����H�̂Ƃ�������ʐM�@�����̂悤�Ȍl����ɍs���Ă���������Ƃ��낪���ɏ�����܂��B�@�F������c�w�e�t�@�C�����`�����������̂ł���A��x�g���C���Ă݂ẮH�Ǝv���܂��B
�i�Q�O�O�X�N�U���P�P���j
�\�z�����͐i��ł��܂��B�@����`�������W�ł����A�v�����g��� EzPCB �ɔ������Ă݂悤�Ǝv���܂��B�@���i���������Ƃ����͂ł��ˁB�@������ƃO�O���Ƃ��낢��Əo�Ă��܂����A���s�k���Ȃ�������v�Ȃ̂ł��傤�B�@�����̃��[�g���m���ł���A�����z�ɗD�����Ȃ�̂ŁA���ꂵ������ł��B
���ƁAEagle �̃t���[���C�Z���X�̋������������܂����B�@GerbMagic �ł��B�@����ʼn������������̂��ł����A�K�[�o�f�[�^�o�͌�̃f�[�^�Ŗʕt�����s�������̂ł��B�@Eagle ���̂��̂Ŗʕt���̕��@�ɂ��Ă͈ȑO�Љ���ʂ�ł����A����̌��_�́A���i�ԍ��������ԍ��ɂȂ�Ȃ��悤�Ɏ����I�ɂ��炷�d�l�����邽�߂ɁA�������̂��Q���ʕt�������Ƃ����ꍇ�ɂ́A������Ǝ�Ԃł��B�@�܂��AEagle�̃t���[���C�Z���X��80mmx100mm�Ȃ̂Ŗʕt���̖ʐς�����ɗ������Ă��܂��B�@EzPCB�Ȃǂɔ�������ꍇ�͏����Z�b�g�A�b�v��p��������̂ŁA�P�ʂŒ���t�����f�[�^�������ł���A�����ł��܂�����ˁB�@���̔����ɂ�GerbMagic�����p���Ă݂����Ǝv���܂��B
�i�Q�O�O�X�N�U���P�Q���j
P��.COM �� \12,000�L�����y�[�����{���B�@100x100mm�����T���ł��̉��i�͖��͓I�B�@�ł����A�V���N���ЖʂȂ̂ŁA�����肳���Ă��������܂��B�B�B
�i�Q�O�O�X�N�U���P�W���j
����͎q�ǂ��ƈꏏ�ɏH�t���� ROBO-SPOT �� POM���H�i�ƃp�[�c���ɍs���܂����B�@�q���Ƀ��{�b�g��̌����Ă��炨���Ɓi�����̂��͓̂���P�����Ȃ̂ŐG�点�Ă��Ȃ��̂ł����B�B�B�jKHR-2HV �����肵�ĕ���������A�T�b�J�[�������肵�Ă��܂����B�@�ق�Ɨǂ��ł��Ă��܂��ˁB�@�ȒP�ɗV�ׂ��̂ł��X���o����A�勻���ł����B�@�������������ŗV�ׂ郍�{�b�g�ɂ��Ȃ��Ƃ����Ȃ��ȁA�ƕ��ɂȂ�܂����B
POM ���H�̏o���h���́A���ɂ��ꂢ�ł����B�@���� 2mm�ӂ̌����J���Ă��Ȃ������i�ꏊ�̖ڈ��t���Ă����j�̂ŁA�Ђ��т��ɑ��h�������������ł��B
���ƁAEagle �ɂ��PCB�����ɂ߂ǂ������܂����̂ŁA�^��_���������������̂ł����P�_�����ɍi���� EzPCB �Ƀ��[�����Ă݂܂����B�@�d���ȊO�ʼnp��̃��[������̂����߂ĂȂ̂ŁA������Ƌْ��ł������A�܂��A�ʂ���ł��傤�B�B�B
�����͕��̓��B�@�q���������̃��b�Z�[�W�J�[�h�����炢�܂����B�@���ꂵ�����̂ł��B
�i�Q�O�O�X�N�U���Q�P���j
EzPCB �Ɋ�������s���܂����B�@�ȒP�ȉp��̃��[���̂����Ŗ����ɔ����ł��܂����B�@�킩��Ȃ��Ƃ���́AI have some questions. 1st, ... �Ƃ����������ŏ����Ή����܂��B�@���́A�ƂĂ��ȗ������ꂽ���͂ʼn����邱�Ƃ������āA���̈Ӗ����킩��Ȃ��i���ʂ�ɂ����߂ł��Ă��܂��j�̂ŁA������J��Ԃ��Ă��܂��܂����B�@�����ȃ��[���̂����́A�ȉ��̒ʂ�ł��B�@���̃L�[���[�h��������A��������A�Ƃ����̂��o���Ă����Α��v�ł��傤�B�@��������Ȃ�� broken-english �Ȃ̂ŁA�C�y�Ƀ��[�����܂��傤�B
EzPCB) Thanks for placing order at www.ezpcb.com. Your order will be checked
and quotated very soon, please be patient.
���̃��b�Z�[�W�́AWeb �ɂ� gerber �t�@�C����o�^�����ۂɎ����I�ɑ��t����Ă�����̂ł��B
���̌�̃��[���̂���������邽�߁Agerber �t�@�C���̓o�^�̑O�ɁA���x�����[���ʼn�b���Ă����Ƃ悢�ł��傤�B
���ɁA���ς���̓^�_�Ȃ̂ŁA���̂��łɂ킩��Ȃ��Ƃ�������Ƃ��|�C���g�ł��B
���ƁA��������~�X��h�����߂ɁAgerber �t�@�C���ƈꏏ�� readme.txt �t�@�C����
PCB ���������Ă����Ƃ悢�ł��傤�B
prototype �� PCB �ɂ͒�R��R���f���T���^�_�ł��Ă����T�[�r�X������̂ł����A�ɂ��Ȃ��Ƃ��������ƂŁA
���炦�Ȃ����̂�����܂����Areadme.txt �ɏ����Ă����ƌ��ς��胁�[���̎��ɋ����Ă���܂��B
EzPCB) hi, for your file xxxxx.zip. it is 2layers, 1.6mm thick ,HASL,4PCS
it is $xxx shipping by EMS is $20 paypal: $xxx total price is $xxx
�ŏI���ς���������Ă���܂��B�@�����OK�B�ƃ��[������ƁA���̃��[�������܂��i������Ǝ��Ԃ�������܂��j�B
EzPCB�j hi, attached is the order form ,please check it first and then
i will begin it after i received the payment.
�Y�t���Ă��ꂽ���[�h�t�@�C���́A���ɒl�i�Ƃ���������Ă��܂��B�@��ʂ�ڂ�ʂ��ă`�F�b�N���܂��傤�B�@���́A�Ō��
payment�B�@the payment �� paypal �ł̑��t������Ɛ���Ɏ����ő����郁�[���̂��ƁB�@����
document ��p�ӂ��Ă���A�Ƃ������Ƃł͂���܂���B�@���ӓ_�́Apaypal account
�́AEzPCB��p�̂��̂�����܂��B�@�i���������������̂ł����j���̎��_�ł킩��Ȃ���A���킸�APlease
tell me your paypal account. �ƌ����܂��傤�B�@���͂����ŁA�R��قǃ��[���̂���肵�܂����i����ƌ��t�����ݍ��킸����܂����j�B
paypal �ő���������ƁA���炭�̌�AEzPCB ���烁�[�������܂��B�@�������m�F���܂����B�@���̌㉽������H�Ƃ�������Ă��Ȃ��̂ƁAnew
customer gift �̘b�Ƃ��S�R�o�Ă��Ȃ��̂ŁA���킸�ACould you give a new-customer-gift
for me ? ���[�����܂����B�@����ƁA�[����gift�������A�̃��[�������܂����B�@����łЂƂ܂����S�B�@�P�T�ԂقǑ҂��܂��傤�B�B�B
�i�Q�O�O�X�N�U���Q�T���j
�����͂R�̒����悩��i�����͂����B�@���Ⴍ���Ⴍ�� JiGoRo3 �̕��i�������Ă����̂ł����A�Ȃ��Ȃ��v���悤�ɑg�ݗ��Ă��i�܂Ȃ��B�@�����ƏW�����Ȃ��ƁB�B�B�@�R���Z�v�g�͐������͂��B�@����������Ǝ��s���Ȃ��łق��Ă�������A����x��ɂȂ��Ă��܂��B�@����ȏ�J��Ԃ��Ȃ��悤�ɂ��Ȃ��ƁB
�i�Q�O�O�X�N�U���Q�U���j
EzPCB �ɔ������Ă�������͂��܂����B�@�V���N�����������Ă��܂��Ă邩�ȁH�Ƃ�����ۂ������܂����A�\�����p�ɑς���̂ŗǂ��Ǝv���܂��B
 |
 |
����́A�v�`�v�`���g�����^���ŁA�~�V���ڂŊ���Ȃ��悤�ɂP�������������t�ɂ��ē���Ă���Ă܂��B�@�Q�c�O���������Ƃ�����܂��B�@�P�ځA�v���g�^�C�v�p�ɖ����ł��Ă����͂��̃R���f���T�`�b�v���v�����ɂ�����̂��قƂ�ǍɂȂ��A�Y�t���Ă��������Ȃ������Ƃ������Ƃł��B�@�Q�ځA�Ō�̍Ō�܂�EzPCB����̉p�ꃁ�[�����W���ŁA��R��Ă��邱�Ƃł��B�@EMS�g���đ�������A�Ƃ����Ō�̃��[�����AEMS�� track-number ��`���Ă���Ȃ��Ė₢���킹���[�������̂ł����y�j���������̂ŕԐM�͌��j���B�@���ǁA�������� track-number �̒ʒm���[�����͂��܂����B�@�Ӗ��Ȃ��ł���˂��B�B�B�B�@�ǂ�ȃ~�X�����Ă��~�X���Ǝv���ĂȂ��̂��A�ӂ�̃R�����g������Ȃ��B�B�B���ꂪ���ʂȂA�Ǝv���đΉ����������ł��傤�ˁB
�i�Q�O�O�X�N�V���V���j
EzPCB�����̊�ɔ��c�t�����B�@�P�ӏ���H�~�X�����Ă��܂����̂ł����A�Ȃ�Ƃ��z���ʼn���ł��܂����B
JST��EH�R�l�N�^�����p���Ă���̂ł����AJST-SHOP(JST�̒ʔ�)���g�����������ɓ���ł���X�������܂����B�@���́A�H�t���ɔ����o���ɍs�����ۂɂ͕K����������Ă����̂ł����A���̂��X�ł��ʔ̂��Ă���̂�m��܂����i�R�R�j�B�@�����z�ɗD�������X�A�撣���Ăق������̂ł��B
�i�Q�O�O�X�N�V���P�Q���j
SEMB1200A �� newlib �� malloc() ���g���ꍇ�A���������m�ۂł��Ȃ��P�[�X������悤�ł��B�@sbrk() �ŗ̈�m�ۂ��悤�Ƃ��Ă��G���[�l -1 ���Ԃ����ꍇ�Ald �̍ۂ� -lnosys �����Ă݂Ă��������B�@�f�t�H���g�œ���Ă����͂Ȃ��Ǝv���܂��̂ŁAspecs �ɏ�������Ă��ǂ��Ǝv���܂��B�@���c����\�[�X�ɂ����͂��肪�Ƃ��������܂��B
�i�Q�O�O�X�N�V���P�X���j
SEMB1200A �̃��C�u�������X�V���܂����B�@���킹�āASEMB1200A �̃y�[�W���������܂����i��A�������܂����j�B�@���C�u�����ɂ��ẮARel.1, 2 ������܂��B�@include/semb1200a/mipsregs.h �ɕs����������̂ŁARel.1, Rel.2 �Ƃ��ɏC�����Ă���܂��B�@gcc-4.x.x �Ŋm�F���Ƃ�Ă��錻�ۂȂ̂ł����A#define ���������萔��ϐ��Ƃ��Ē�`���Ă��G���[�ɂ����[�j���O�ɂ��Ȃ炸�A�A�Z���u���R�[�h�Œʂ��Ă��܂��C�t�����ɂ���P�[�X���U�����Ă��܂��܂��B�@����������ƁAgcc-3.x.x �ł������Ȃ̂�������܂���B�@�ΏۂƂ��Ă��镶���́Av0, v1, a0�`a3, t0�`t9, s0�`s7, k0, k1, gp, sp, fp, ra �ł��B�@�܂� MIPS �̃��W�X�^���ł��B
�i�Q�O�O�X�N�V���Q�T���j
�ޗ��������Ă����{�b�g���������Ȃ��B
�����̂��Ƃł͂���̂ł����A�V�������̂ɒ��肵�Ă��܂�����ł��傤�ˁB
����́A�A�i���O�W���C�X�e�B�b�N�S�A�{�^���W�� Zigbee �R���g���[��������Ă܂��B�@�R���g���[���͔��ɃV���v���Ȑv�ŏI���A�Ǝv������A�~�X�����B�@PCB����C�A�E�g�C�����邨�������������Ȃ��̂ŁA��R���g���ċz���B�B�B������Ƃ݂��Ƃ��Ȃ��B�B�B�i���ǁA�ǂ����P�[�X�ɓ����̂Ō����Ȃ����A���{�b�g���ł͂Ȃ��̂ł�����ۈ����͂��Ȃ�����A��R�͊O��Ȃ��ł��傤�j
�Ȃ������Ă��邩�A�ł����A�v���X�e�̃A�i���O�W���C�X�e�B�b�N����8bit�̏�������Ȃ��̂ŁAKRS-401x
�Ȃǂ̂悤��270�x����������T�[�{�̏ꍇ�A�P�x�ȏ�̈ʒu���䂵���ł��Ȃ����߁A���삪�J�N�J�N���Ă݂��Ă��܂����߂ł��B�@�����ƁA�s�^�b�ƖړI�̎w��A������w�肵�����A�Ƃ����v�����瓥�݂���܂����B
 |
 |
����́A10bitADC��8ch�����Ă���8bit�}�C�R����T���܂����B�@���ǁA�I���E�`�b�v�E�f�o�b�K���g����NEC�G����78K0/KC2�ɂ��܂����B�@�������p�b�P�[�W�ŃR���p�N�g�Ɏd�オ��܂����B
�v���O�������ȒP�Ɏd�グ���Ƃ���ŁA�ēx�A���{�b�g�g���ĊJ�n�ł��B
�i�Q�O�O�X�N�V���Q�U���j
SEMB1200A ���e�N�m���W�A������̔��J�n����܂����ˁB�@���肪�E�E�E�Ƃ��������������Ă��Ă��āA�����P���[�U�[�Ƃ��ĕs���ł����i�j�B�@����ɂĈ���S�B
���ƁA���c����̂Ƃ���ŗ�O�G���[�ɔY�܂���Ă����b���i�������Č�������܂����j�܂Ƃ߂Ă����܂��B�@�F�l���Y�܂��ꂽ��P�x����ł����������݂Ă��������B
�E�@sugi3����̂Ƃ���̃o�C�i���p�b�P�[�W�́Acygwin�܂߂ē������ł��邱�Ƃ���������Ă��܂��B
�E�@��O�G���[�͂������̃p�^�[���������āA�@newlib���ŃG���[�������Ă���悤�ȃG���[�ł����ۂɂ̓��[�U�[�v���O�������ł̏����ɗU������Ă���@�A���̈������P��
float�^�̏ꍇ�ɗ�O�G���[���ł�idouble���ƂłȂ��j�@�B srbk(), malloc()
���ł��Ȃ��A�C sprintf() ���g���ƁA���̑������ύX���Ă��Ȃ��Ă� atoi(),
atof() �Ȃ� strtol() ���ŃG���[���ł�A�Ƃ��������̂ł��B
�E�@��L�̑�Ƃ��āA�@ gcc �R���p�C���I�v�V������ -O (�œK���j������A�A
-mdouble-float ���R���p�C���I�v�V�����ɓ����A�B -lnosys �������N���Ɏw�肵�ă��C�u������ǂݍ��ށi�f�t�H���g�œ���Ă����Ȃ������Ȃ̂�
specs �ɏ�������Ă��܂��Ă��ǂ��ł��j�@�C�����s��
�E�@�����\�[�X�R�[�h�ł����Ă��Agcc-4.1.2, gcc-4.2.4 �ŋ������Ⴄ�i��L��@�A�A�ł��������ʂ������Ȃ��B�B�A�C�͓������ʂł����j
�@������ɂ��܂��Ă��A������肪�łĂ����ȏꍇ�́A������Ə�����܂��B�@�����P���[�U�[�ł��̂ŁA�ǂ��܂Ńt�H���[�ł��邩�킩��܂��A���艻�̂��߂Ɋ撣���Ă݂܂��B
�i�Q�O�O�X�N�V���R�O���j
�֓����{�b�g���K��ɎQ�������Ă����������Ƃɂ��܂����B�@�����܂łɉ��Ƃ��������{�b�g�Ɏd�グ�����A�Ƃ����ڕW�ݒ�ł�����܂����A�����Ƙe���ɂ����낤�Ȃ��B�B�B
����Ȓ��łĂ���̂��A�Ђ��т��� cvs ���g�����Ƃ�����g���Ȃ��B�@���������ACygwin��V�������Ă���P�x���g���Ă��Ȃ������Ȃ��B�B�B
Cygwin ���t���C���X�g�[�����Ȃ��Ƒʖڂ��ȁH�@�O�O���Ă݂Ă��ADevelpment
�������ŗǂ������Ȃ��ǁB�B�B
�i�Q�O�O�X�N�W���S���j
�䕗�Ƃ��n�k�Ƃ��������Ȃ��Ƃ����낢��ƋN���܂��ˁB
���āA���삵�Ȃ����� CVS �ł����A���낢��Ƃ���Ă݂܂����B�@Cygwin �̍ăC���X�g�[�����c����邾���̂��Ƃ͂�������������Ă��܂��B�@���A���삵�Ȃ��B�B�B�@anonymous �ł� commit ���ł��Ȃ��̂ł��B�@�����ŁAWinCVS + ssh + Python ���g�����Ƃɂ��܂����B�@Python �̓}�N������H�����邽�߂̃c�[���݂����ł��i���ɃC���X�g�[���s�v�����j�B�@WinCVS-2.0.2-4
+ ssh-1.2.14-win32 +�@Python-2.3.4 �̑g�ݍ��킹�Ƃ��܂����B
�eweb�T�C�g�ŃC���X�g�[���̎d�����ڂ��Ă���̂ŁA�����������Ƃ��낾���L���Ă����܂��B
�E�@WinCVS �́A�ŐV�łɂ��܂����i���{��p�b�`�ȂǂȂ��j
�E�@ssh ���g���ۂ̊��ϐ��� Windows �ɓo�^�B�@�V�X�e���A�C�R�����B
�@�@�@HOME, CVS_RSH, CVSROOT �̂R�B
�@�@�@HOME �� .ssh/�@�����f�B���N�g��
�@�@�@CVS_RSH=ssh
�@�@�@CVSROOT=:ext:username@cvs.sourceforge.jp:/cvsroot/modulename�@�E�E�Eusername �� sourceforge.jp �̃��[�U�[���Amodulename �� hos �̏ꍇ�Ahos
�Ƃ���B
�E�@ssh ���g����sourceforge.jo �ɃA�N�Z�X���������̂ŁAssh-keygen �Ȃǎg���ASSH���J�L�[���쐬����B
�@�@�@ssh-keygen -C username@localhost (= �������g��PC�̃A�J�E���g��PC�̖��O�@�ŗǂ��B�@���[���A�h���X���w�肷��Ƃ����T�C�g������B�j
�@�@�@-C ���w�肵�Ȃ��ƁAgethostname �Ƃ����R�}���h�� localhost ������肷��݂����Ȃ̂ł����A���̃R�}���h���Ȃ��A�ƌ����ď������I������B
�E�@ssh-genkey �łł��� $HOME/.ssh/identity.pub �� sourceforge.jp �� SSH���J�L�[�ɂēo�^����B�@��T����ɓo�^��������B
�E�@WinCVS ���N�����Alogin ����K���ɍ��i��LCVSROOT�Ɠ����v�́j�B
����܂ł̔Y�݂͂Ȃ����A�Ƃ������炢����Ȃ�Ɠ��삵�܂����B
�����ǁA���� CVS �ł�肽�����������H�H�H
�b�̓��{�b�g���ɖ߂��܂��i�Ƃ������A���{�b�g�̘b�͋v���U��H�j�B
�Q�������炢�ɑO�ɍ�������s�����N�̑���Б������g�ݏグ�Ă݂܂����B�@���ʁA�Ȃ�ƂQ���������ꂽ�v�~�X�����Ă��邱�Ƃ��킩��܂����B�@����A�A���~���ɉ����āAPOM���H���s���Ă��āAPOM��
M2 �l�W�p�̌���������̂��ʓ|�A����A���~�x�݂܂Ŋy���݂�����Ă����̂ł����B�@���ꂪ���s�ł����B�@��g�����ł�����Ă����ׂ��ł����B�@2mm����Ă��܂������A�~�߂���Ƃ��낾���l�W�~�߂��ĕ��s�����N�����Ă݂܂����B�@�Ȃ�قǁA�ł��B�@�y���X���[�Y�ɓ������̂ł��ˁB�@�q�U�ɃT�[�{���Ȃ��̂ɋ��L���ł���͖̂ʔ����ł��ˁB�@����JiGoRo3
���{�b�g���c���Ă����P�̂��肽���Ȃ�܂����B�@���ƁAKRS-4013 * 18�i13��+5�\���j����Ȃ��B�B�B
�i�Q�O�O�X�N�W���P�P���j
EzPCB �l�^�ł��B�@�P�x�ڂ̔����̍ہA�~�V���ډ��H�����肢���܂����B�@����AV-CUT �����肢���܂����B�@�Ƃ��ɁA$30 �ł����B�@simple 'cut out' is free �Ƃ����������������̂ŁACUT OUT �ł��肢���܂��A�ƌ������̂ł����A����� $30 ���Ƃ̂��ƁB�@���� free �Ȃ̂��A�����ƕ����Ȃ��Ƃ��߂ł��ˁB�@������ɂ��Ă��A���ʕt���Ă̔����̏ꍇ�́A$30 �Ƃ����̂���������A�Ɗo���Ă����ΊԈႢ�͂Ȃ������ł��B�@����̏ꍇ�A���� $30 �����Ƃ������ƂɂȂ����̂ł����A�����L�����y�[�����̂Ƃ�������A�����܂߂Ă������ł����̂Ŗ����ł��i���������ʃV���N�j�B
�i�Q�O�O�X�N�W���P�P���j
![]()
�ċx�݂��I����āA�͂�Q�T�ԁB�@�v�����X�V���~�܂��Ă邱�Ƃ��v���o���܂����i�j�B
�������Ă��� EzPCB �������͂��A�O�����̕s������������������ł����B�@���ɂ��A�d���Ŏg�����߂̊�����킹�č�肱���A�p���B�B�B�@�܂��A���܂����y�n���g�����̂ŗǂ��̂����A����������ƍl���č�肱�߂ƁA���ȁB�@������Ɗ撣�肪���肵�������B
ROBOSPOT �� POM 5mm���H���˗�������B�@1/4�T�C�Y�ɓ���傫���������̂ŁA���Ɉ����ɂł����̂Ŗ����B�@�����A2mm�����J�����Ȃ��i�ꏊ�����̓h������̐Ղ��c��j�͉̂��P�����҂������B�@���{�b�g���[�U�[��
M2 �l�W���g���l�������Ǝv���̂Łi����KRS-4000�V���[�Y��M2�������j�B
���͂�����Ɣ߂����l�^�B�@�A�x���̘b���ł����A���߂Ď�����ĂĂ����n���X�^�[������ł��܂����B�@�q���̋�������˂Ă����̂ł����A���\������������Ă����̂������B�@�������C�ɐ��b�����Ă���̂��C���]���ɂȂ��Ă����悤�ł��B�@��ĕ��������Ă��߂�ˁA�n���X�^�[�B�B�B
�Ō�ɖ��邢�l�^�B�@�����͋������B�@�{�[�i�X�͊��҂ł��Ȃ����A�����͂����Ƃ��炦��i�͂��j�Ȃ̂ŁA�y�����d�������悤�I
�i�Q�O�O�X�N�W���Q�U���j
�܂��܂��X�V���~�߂Ă��邱�ƂɋC�������B
�@�����A�S���ɋN���ĉ��������S�\�S�\����Ă�̂ł����A���{���͎~�܂����܂܁B�@JiGoRo3
���Q�o�[�W�����g�ݗ��Ă͏I����Ă���̂ł����A�Γ�������Ă��Ȃ���Ԃł��i���ɂ��������Ȃ��j�B�@ROBO-ONE
��ڎw���ăX�^�[�g�������{�b�g���������Ȃ�̃R���Z�v�g�������������ɂȂ����Ƃ��A�����l�b�g�T�[�t�B�����Ă��܂��B�@���̏ꍇ�A�ŐV�L�������ł͂Ȃ��A���N�O�܂ł����̂ڂ��ēǂނ̂��D���ŁA���\���Ԃ������ēǂ�ł����肵�܂��i�Ȃ̂ŁA���{��肪�i�܂Ȃ��H�j�B�@���낢��ȕ��̃��{�L����ǂ܂��Ă��������āA������������ȁA������������ȁA�Ɩϑz�������c���ł����܂��B�@���N�O�AROBO-ONE
�����샍�{�������o�Ă�������̋L�������������ǂ�ł���ƁA���{����ɋC����������Ă���Ƃ��́A�l�b�g�T�[�t�B�������Ȃ��Ƃ��{���������ނƂ��A�������W���͂ł������Ă�����ł���ˁB
�@�l�b�g�T�[�t�B�����肵�Ă��Ȃ��ŁA���̃��{�b�g�̌��w�Ƀ��{�A�ɍs�������̂ł����A�ǂ����֓��n��̃��{�A�Ƃ͓����̑����������݂����ŁA�����\�肪�Ԃ����Ă��܂��Ă��܂��B�@�Ȃ̂ŁA�����Ń��{�A�𗧂��グ�Ă݂Ă������̂��ȁH�Ƃ��v���̂ł����A���肫����Ȃ��̂��ƁA�Ȃ��Ȃ��l�͏W�܂�Ȃ����낤�ȁA�Ƃ��A���{�A�Ƃ��Ă̖��͂������Ȃ��Ƃ����Ȃ����낤�ȁA�Ƃ��AROBO-ONE�����̎���������ďW�܂�낤���Ƃ��A���낢��ƍl���Ă��܂��܂��B�@���̂Ƃ����������A���{�b�g���g�������K��ł͂Ȃ����āA���{�b�g�����y���������C���C�ł��郍�{�A�H��ڎw�������ȁA�Ɗ����Ă��܂��B�@�P�������Ă��悢���A�L�b�g��g�ݗ��ĂĂ��悢�̂ł����A�ŏI�I�Ƀo�g�����邱�Ƃ��ڕW�ł͂Ȃ����āA���{�b�g�����������Ă����A�Ƃ����ڕW�����߂č��グ�Ă����Ƃ������Ƃ����Ă݂�����ł���ˁB�@�P���ɕs���n������Ă��̂��^��ł����A�ł��������A�Ƃ̒������邮������āA�n�}�����ł��������A�������̂�������̂悤�Ƀz�E�L�����đ|�����ĕ����ł��������A���̂��߂̋Z�p�͉����낤���Ĉꏏ�ɍl������A��邽�߂̒m�b���o����������A����ȏꂪ�����ł��ˁB�@�܂��́A�g�ݍ��݃}�C�R���̃v���O���~���O���炩�ȁB�@�������Ɗw�ł���Ă�̂ł����A�A�[�L�e�N�`���Ƃ������A�J�����i�R���p�C���̎d�l�j�ł͂܂�P�[�X�������C�����Ă��܂��B�@�����Ȃ��Ƃ��A�p�\�R���v���O���~���O�̏�肾�ƃ~�X���u�g�ݍ���Łv���܂��̂ŁA���������Ƃ���̃L���͕��������Ǝv���Ă܂��B�@�����������ł��āA�����łł���ƃ��[�V�����o�^�̃��{�b�g���삩��A���낢��Ƃ�肽�����Ƃ������Ă���͂��B�@���[��A�ǂ����悤�B�B�B�@�������I�Ƃ������A�������b�Z�[�W�A�ꏏ�ɂ�낤���A�Ƃ����l�����烁�[���A�����������B�@���k���܂��傤�B
�@�Ƃ������A�����̓��t�H�[����P�e�̓��B�@���炭�g���Ă����A�G�A�R���Q��ƁA�①�ɂ̓���ւ��B�@�G�R�|�C���g�Ƃ������A���������ȑ|�������Ă����̂ŁA�G�A�R���̃J�r���C�ɂȂ��Ă��āA�̒��s�ǂɂȂ�O�Ɍ����i�ґ�ł����j�B�@�①�ɂ��P�O�N�g���Ɖ���i�͂��j�Ȃ̂ŁA��������P�O�N�̍��N�Ɍ����i�g�p�͂X�N�ڂ��ȁH�j�B�@�����A�閾�����B�@�Z�����Ȃ邼�B
�i�Q�O�O�X�N�X���P�R���j