 |
KO Red Version ポジションキャプチャ
(2005年 4月 3日 (C) 岡田 紀雄)
KO KRS-2346ICS RedVersion に搭載されているポジションキャプチャについてまとめておく。
実験開始前の考察
KO KRS-2346ICS RedVersion を BTC-070 (SH2/7047F) に接続し動作確認を行った。 まず、マニュアルに記されている事項で注意しなければならないことをリストアップしておく。
また、マニュアルにはないが、重要な情報をメモしておく。
制御CPU を壊したくないので、まず CPU のマニュアルから調べることにした。
とすると、通常PWM信号を出力している際に、プルアップ抵抗に流れる最大許容電流値が 2mA といえる。 プルアップする電位を 5V とすると、2.5kΩ以上の抵抗が必要であるといえる。
壊れるかな? と思いつつも、今回は実験のため、2.0kΩ, 4.7kΩ, 10kΩの3種類の抵抗を使って、ポジションキャプチャの実験を行ってみることにした。
試験方法
今回は、サーボへ0.7msec.〜2.3msec.のPWMを出力し、100μsec. のキャラクタリスティング&ポジションキャプチャで出力値と入力値に対しての差を見ることにした。 また、PWM出力設定から、キャプチャまでの時間を 100msec, 200msec, 500msec, 1sec と振り、サーボの回転が安定するまでの時間もキャンセルできるようにした(回転中にキャプチャしたらズレるので)。
試験結果
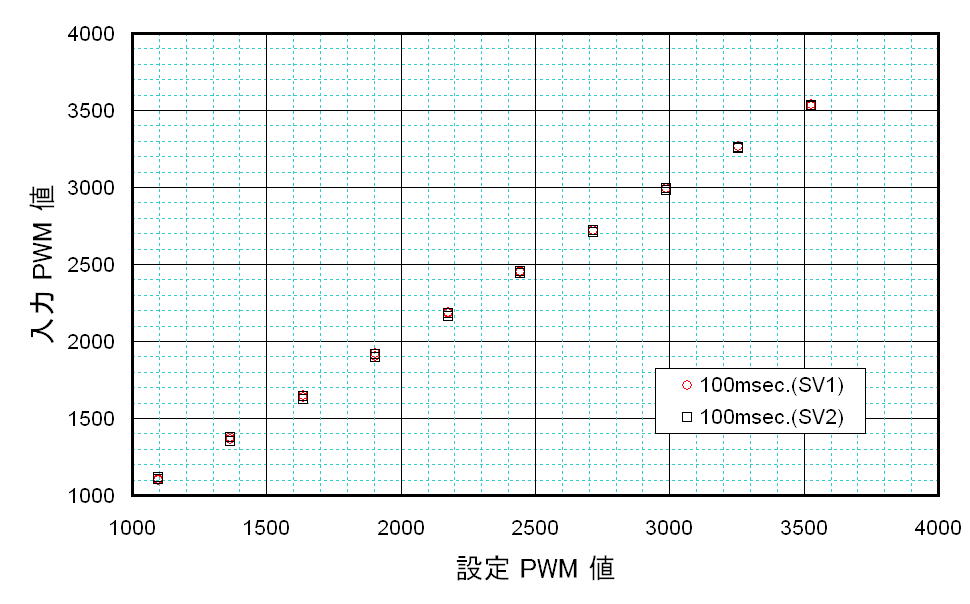
ごく一般に設定値に対する出力値のグラフを作ってみたのが、下図である。 以後、サーボは2つ分接続のグラフであるが、多数接続の場合も同じ結果である。
|
しかし、これでは一致しているのか、ズレているのかわからないので、出力に対する入力の差でグラフ化してみた。
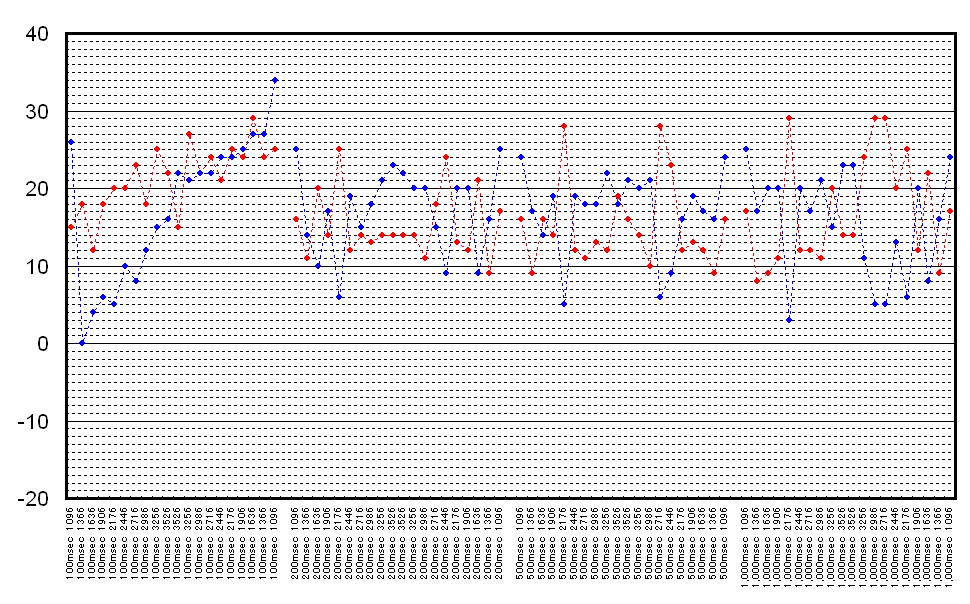 プルアップ抵抗 10kΩ時 |
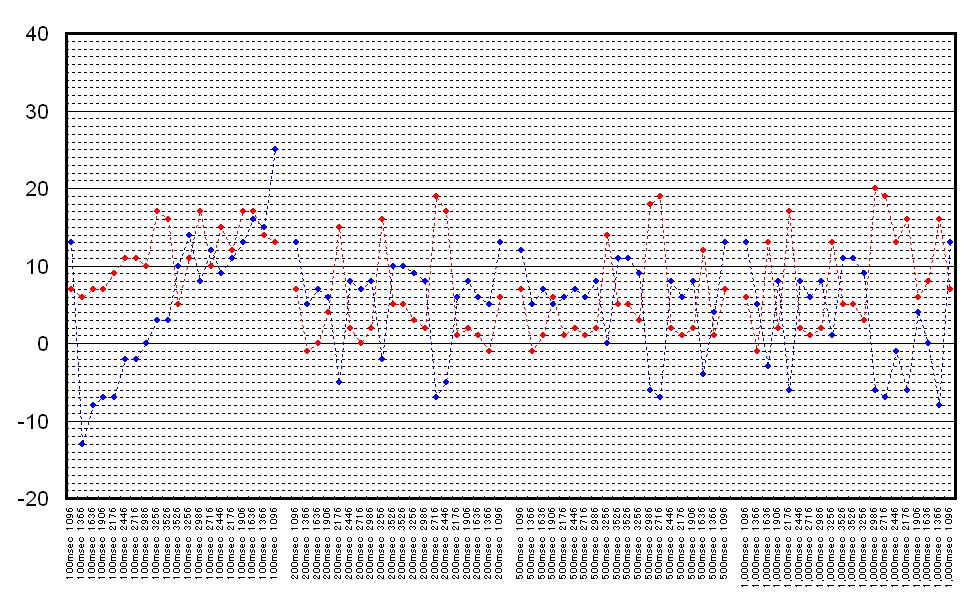 プルアップ抵抗 4.7kΩ時 |
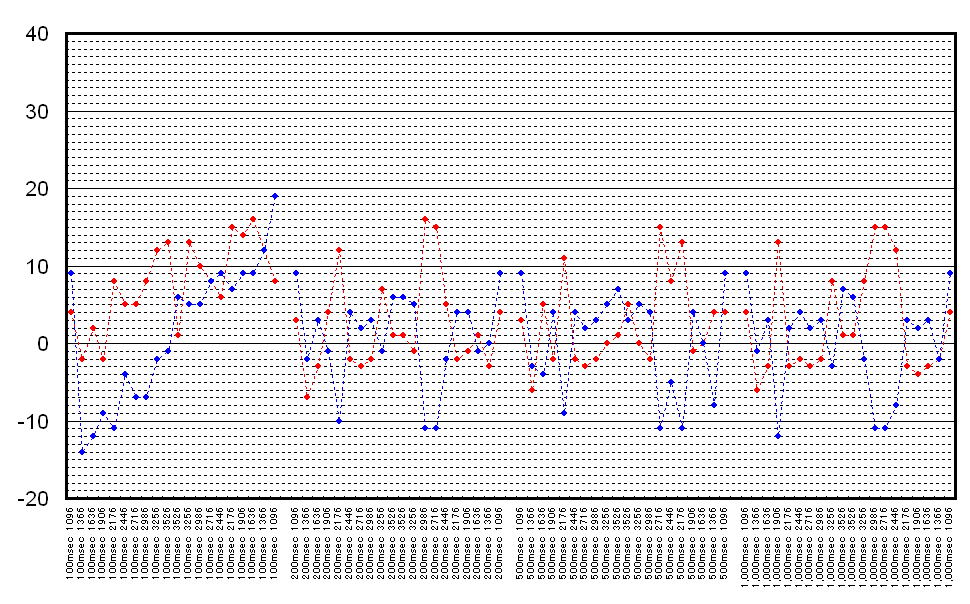 プルアップ抵抗 2.2kΩ時 |
横軸が出力と入力までの待ち時間&出力PWM値、縦軸が入出力PWM値差分です。 プルアップ抵抗を小さくするに従って、差分が0に近づいていることがわかる。 また、入出力の待ち時間は200msec
以上あった方がよさそう(本実験では約20度のステップで角度を連続的に変化させているので、角度の大小によっては最適値が異なると思われる)。
また、十分にプルアップ抵抗が小さい場合でも(CPU端子の限界以上の電流をかけても)値そのものが安定しないのは、各種ノイズによるものと思われるので、対策が必要。 特に、無負荷状態で試験したにもかかわらず、サーボがジリジリ音を立てていたときに限って、10を超える誤差が出ていることからも、サーボ内のポテンショメータの読み取り誤差は致命的であるといえる。
