|
|
R1N-Series 惢嶌擔婰丂
2003擭 8寧朸擔丅丅丅
丂偁傞嶨帍 ( 僩儔儞僕僗僞媄弍丗2002擭俉寧崋丟侾擭慜偺嶨帍乯 偺惉徏偝傫偺乽柍慄扵嵏儘儃僢僩偺惢嶌乿傪撉傫偱偟傑偭偨偙偲偐傜丄儘儃僢僩奐敪偺摴傊丅丅丅
丂乽ROBO-ONE 偵巋寖偝傟丄偝傜偵壛懍丅丅丅丂惁偄両丂惁偡偓傞両両丂屄恖偱偙偙傑偱偱偒傞偺偐偀両丠乿
- 廐梩尨僠儍儞僾偵偰丄儔僕僐儞梡 RC 僒乕儃傪攦偄崬傒傑偟偨丅
- 崱夞丄慖傫偩偺偼丄嬤摗壢妛乮姅乯偺 PS-2174FET 偱偡丅
僠儍儞僾偱偼丄掕壙 \12,000 偺偲偙傠傪 \6,600 偲敿抣嬤偄壙奿偱偟偨丅
僩儖僋偼 12.0kg/cm (@6.0V) 偲僗儁僢僋揑偵偼怽偟暘側偄偺偱丄巚偄愗偭偰乽懌乿偺暘偩偗峸擖丅
僒乕儃斾妑偼丄僶乕僯儞僌媨揷偝傫偺 Web 偑偲偭偰傕嶲峫偵側傝傑偟偨丅
- 侾屄堘偆敔偼丄摢晹暘偺惂屼梡偲偟偰 KO PS-712FET (\3,300) 峸擖丅
- 崱夞偼丄僣僋儌丒儘儃僐儞儅僈僕儞娰偺揦堳偝傫偺傾僪僶僀僗傕偁傝丄崅壙側僨僕僞儖僒乕儃偼傗傔丄傾僫儘僌偩偗偳崅惈擻側傕偺偱懙偊偰傒傑偟偨丅
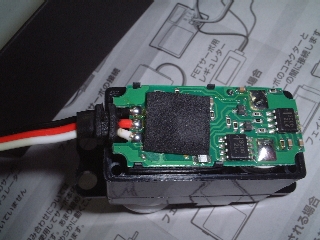
- 偄偒側傝丄暘夝偟偰傒傞偙偲偵丅丅丅
- 偪偭偪傖側婎斦偑弌偰偒偰丄
偙偙偱丄PWM 怣崋傪惂屼偟偰偄傞偺偐側丠丂偲丅
- 偪側傒偵丄崟丗GND, 愒丗Vdd(+6V), 敀丗PWM 偱偟偨丅
- 偙偺婎斦棤偵偼丄儊僞儖僊傾偑價僢僔儕丅
- 儀僗僩僥僋僲儘僕乕乮姅乯偝傫偺惂屼儃乕僪堦幃傪峸擖丅
僣僋儌丒儘儃僐儞儅僈僕儞娰偵偰乮儊乕僇乕掕壙乯丅丂傕偭偲埨偔偟偰傎偟偄両両
- 惂屼 CPU 偵偼 Renesas HD64F7045F28 ( SH-2 core 32bit RISC 7045F 28MHz)
- PWM, I/O 宯偵 Xilinx FPGA 傪巊梡丅丂杮儃乕僪偼 Rev.B 丅
側偐側偐偺弌旓偩偑丄曕偔偙偲傪柌尒偰丄偄偞丄壖慻傒丅丅丅
Code Name : R1N1
- RC儌乕僞偺僽儔働僢僩偵偼丄乮姅乯僀僩乕儗僀僱僣偝傫偺傕偺傪巊梡丅
ROBO-ONE 弌応幰偺傎偲傫偳偼 1.5mm岤偺傾儖儈斅傪壛岺偝傟偰偄傑偡偑丄
偼偠傔偐傜挧愴偟偰朞偒偰偟傑偆偲僒乕儃戙偑柍懯偵側傞偺偱丄婛惢昳傪巊梡丅
- 懌娭愡晹暘傪僀儊乕僕偟丄慻傒崌傢偣傞偩偗偱偟偨偑丄屢壓侾屄栚偺僽儔働僢僩偼丄
僴儞僪僪儔僀僶乕偵3mm冇偺僪儕儖傪偮偗偰寠偁偗傪偟丄屌掕偟偰傒傑偟偨丅
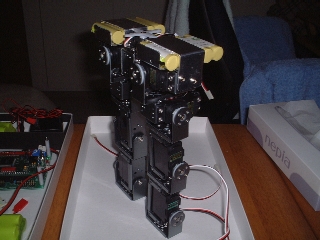
- 僒乕儃偵揹棳傪棳偟偰偄側偔偰傕丄僶儔儞僗傪曐偰捈棫丅
傑偢傑偢偐側丠
C/N : R1N2
- 屢娭愡晹暘偵乽崢乿偵憡摉偡傞僒乕儃傪侾屄捛壛丅
丂仮丂曕峴帪偺忋敿恎偺夞揮埨掕壔偺偨傔乮丠乯
- 偝傜偵丄椉懌忋偵僯僢僇僪僶僢僥儕傪10杮搵嵹乮嵍塃懳徧偺僶儔儞僗傪廳帇乯丅
僶僢僥儕昡壙傕丄僶乕僯儞僌媨揷偝傫偺 Web 偑偲偭偰傕嶲峫偵側傝傑偟偨丅
崱夞偼丄SANYO 偺 KR-1100AAU 1.2V巇條傪俆楢偱 6.0V 丅偝傜偵暲楍壔丅
愮愇揹彜偵偰峸擖偟傑偟偨丅
- 僶僢僥儕乕屌掕偵偼丄搶媫僴儞僘偱峸擖偟偨 1.0mm岤偺傾儖儈斅偱屌掕丅
屌掕偩偗偩偐傜丄僴僒儈側偳偱傕愗傟傞 1.0mm岤傾儖儈偱傛偄偐側丠
C/N : R1N2
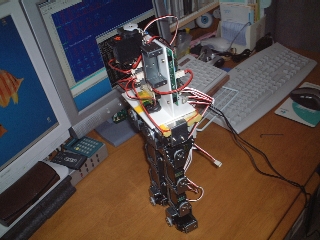
- 摲懱晹暘傪 3mm岤偺僾儔僶儞偵偰嶌惉丅
- 慜柺偵僶僢僥儕乕偺僐僱僋僞偲僗僀僢僠傪搵嵹偟丄惂屼儃乕僪梡揹抮(9.0V) 傪嵹偣傞丅
惂屼儃乕僪撪偺RAM曐帩梡 3.0V 揹抮偲偟偰儕僠僂儉揹抮傪搵嵹丅
- 棤柺偵偼丄惂屼儃乕僪傪攝抲偟丄RC僒乕儃偐傜偺怣崋慄傪宷偘偰傒傑偟偨丅
- 嵞傃揹尮 ON !
偐側傝壒偑偡傞偑棫偮偙偲偼妋擣偱偒傑偟偨丅
丒丒丒 KO 偺 RC 僒乕儃偼壒偑戝偒傔偲偺偙偲丅丂偲傝偁偊偢丄埨怱丅
丂丂丂乮僶乕僯儞僌媨揷偝傫丄僐儊儞僩傪偁傝偑偲偆乯丅
- 娙堈惂屼僾儘僌儔儉傪偮偐偭偰丄僯儏乕僩儔儖埵抲寛傔丅
壒偼偐側傝彫偝偔側偭偨傕偺偺丄傗偼傝帺暘帺恎偺廳偝偩偗偱傕僒乕儃偼歑傞丅丅丅
偪傚偭偲媥宔偑偰傜丄偄傠偄傠側 ROBO-ONE 愴巑偨偪傪 web 忋偱偠偭偔傝娤嶡偟偰傒傞偲丄摿偵 A-Do 偝傫偲斾傋傞偲 R1N
偵偼丄奐媟惈偵堘偄偑偁傞偙偲偑傢偐傝傑偟偨丅
乮俀侽侽俁擭俋寧侾係擔乯
嶲峫偵偝偣偰偄偨偩偄偨 Web site 偼丄
偦偙偱丄懌娫僺僢僠偼峀偔側傞偺偱偡偑丄屢娭愡晹暘偺僒乕儃偺幉傪奜懁偵偟丄侾俉侽搙奐媟偑偱偒傞傛偆偵偟偰傒傑偟偨丅
C/N : R1N3
- 侾俉侽搙奐媟壜擻側僨僓僀儞偵曄峏丅
- 埨掕壔偺偨傔懌傪僾儔僶儞偵偰嶌惉乮13mm挿 x 7mm暆乯丅
懌棤偼丄僑儉偵傛傞偡傋傝巭傔曗嫮偁傝乮僗僯乕僇乕摨條僊僓僊僓僇僢僩偁傝乯丅
- 僶僢僥儕偐傜偺働乕僽儖偼崢偺夞揮偵幾杺偵側傜側偄傛偆偵僇乕儖偡傞丅
- 椉榬傪壖慻傒偟偰傒傑偟偨丅
嵍榬偼庤愭偑夞揮偡傞乮俀幉捈峴乯丅
塃榬偼丄書偊崬傒偱偒傞乮俀幉暯峴乯丅
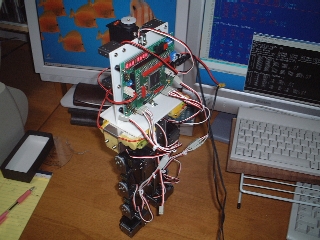
- 惂屼儃乕僪梡揹抮傪 9.0V 僞僀僾偐傜僯僢僇僪僶僢僥儕傊曄峏丅
6.5V 梫媮偲偁偭偨偑丄6.0V 傑偱棊偪偨僶僢僥儕偱傕埨掕偟偰摦嶌傪妋擣丅
偍暊晹暘偵搵嵹丅
- R1N3 偵偮偄偰
- 帺桼搙丂丂曅懌 5 (椉懌 10), 曅榬 3(椉榬 6), 崢 1, 摢 1 丟丂崌寁 18
- 廳検丂丂丂 2.3kg (僶僢僥儕娷傓丟榬壖丄摢側偟丄儃僨傿曗嫮側偟乯
- 揹尮 ON ! 丒丒丒丂僕儕僕儕丒丒丒丂僒乕儃偑歑傞偑丄棫偭偨両丂棫偭偨両両
惂屼僾儘僌儔儉傪嶌傠偆両
偨偩丄偦傠偦傠愒傫朧偺抋惗梊掕擔丅丂僩儘僩儘偟偰傞偲丄梀傇壣側偔側傞偺偱偼側偄偐側丠偲怱攝丅
儘儃僢僩奐敪梡偵 Linux 愱梡婡偩偭偨 Koara 傪偁偰偑偍偆偲偟偨偑丄壗屘偐
RS232C 捠怣偑幐攕偟偰偟傑偭偨偺偱偟偨丅丅丅斶偟偄丅
CPU 僗僺乕僪傾僢僾側偳偟偰偟傑偭偰丄僋儘僢僋偲幚嵺偺捠怣懍搙偵僘儗偑惗偠偰偄傞偺偱偟傚偆偐丠丂撲偱偡丅
巇曽側偄偺偱丄帩偪婣傝巇帠側偳偵巊偭偰偄傞 PC 乮Phenix乯 傪奐敪娐嫬偲偟偰惍旛偡傞偟偐側偄偐側偀丅丅丅
乮俀侽侽俁擭俋寧侾俆擔乯
傂偝傃偝偵丄峏怴丅
僶乕僯儞僌媨揷偝傫偵丄傾僪僶僀僗傪偄傠偄傠偲偄偨偩偒側偑傜丄儘儃僢僩偺峔憐傪傑偲傔偰偄偔丅
尒偨栚偵偼丄偁傑傝曄傢傜側偄偑丄拝幚偵埨掕惈傪憹偟偰偄偔丅丅丅
俋寧俀俇擔偵丄徦夒乮傛偟傑偝乯偑惗傑傟偨丅丂傗偼傝丄愒偪傖傫偼偄偄両丂惗傑傟偰偔傟偰偁傝偑偲偆両両
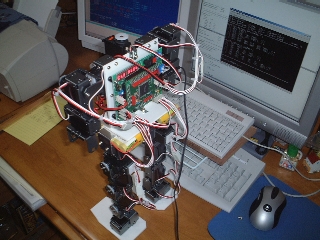
儘儃僢僩惂屼梡偺儔僕僐儞儐僯僢僩傪嶌惉偟偰傒傞偙偲偵偟偨丅丂埲壓偑偦偺幨恀側偳丅
偆乣傫丅
偙偺僷乕僣偮偔傞偺偵傑傞侾擔巊偭偰偟傑偭偨丅丅丅丂愭恖払偼丄偄偲傕娙扨偵嶌偭偨傛偆側姶偠偱棳偟偰偄傞偺偑丄晄巚媍丅丅丅
- 婎斅棤柺偼丄攝慄傪堷偒夞偡偺傒偲偟丄昞柺偵僷乕僣傪傕偭偰偒偨丅丂偦偺偨傔丄H8-tiny 壓偵傕 Tr. 偲掞峈偑攝抲丅丂変側偑傜偑傫偽偭偨傕偺偩丅丅丅丂偙傟偱丄夞楬儈僗偟偰偄偨傜丅丅丅
- 夞楬偲偟偰偼丄RC庴怣婡偐傜偺擖椡怣崋傪 5V 僼儖僗僀儞僌偡傞傛偆偵 Tr. 偲掞峈傪擖傟偨傕偺丅丂RC庴怣婡偼丄怣崋偺傒傪庢傝弌偟丄係們倛偺偲偙傠偑庴怣婡偺揹尮傪寭偹偰偄傞傛偆側偺偱丄H8-tiny 撪晹偺 5V儗僊儏儗僞弌椡傪偮側偄偩丅丂摿暿側夞楬偱傕側偄偺偱丄夞楬恾徣棯丅
仺丂夞楬恾仌僾儘僌儔儉偺儁乕僕傪嶌偭偨丅
偲傝偁偊偢丄惂屼僜僼僩偼丄偙傟偐傜嶌傞偙偲偵偟傛偆丅丂僨儌僜僼僩偼摦偄偰偄傞偺偱丄偦傫側偵擄偟偔偼側偄偼偢丅
偁偲丄埑椡僙儞僒傕峸擖丅丂俉屄攦偭偨偺偱丄偑傫偽偭偰巇忋偘偰傒偨偄丅丂價儕價儕壒偑柭傞乮僒乕儃偑敪怳偟偰偄傞乯偺傪丄懌棤僙儞僒乕庢傝晅偗偱惂屼丒埨掕惈傪傾僢僾偝偣偰傒偨偄丄偲巚偆偑丄偳偙傑偱偱偒傞偐丅丅丅乮偲傝偁偊偢丄彂偄偰偍偐側偄偲丄攦偭偨偙偲傪朰傟偰偟傑偆乯
儘儃僐儞儅僈僕儞娰偺Web偱丄嬤摗壢妛偑怴偟偄僒乕儃傪弌偟偨丄偲偺婰帠偑偁偭偨丅丂僒乕儃揑偵偼丄PDS-2344FET + 僴僀僷儚乕僊儎亄僗僩儘儞僌僊傾丄侾俉侽搙夞揮傪壛偊偨傕偺偩偦偆偩乮揦堳択乯丅丂偲傝偁偊偢丄儈僗儈僗晧偗偰偄傜傟側偄偺偱丄僊傾偩偗偼僷儚乕傾僢僾偟偰偍偙偆丄偲偄偆偙偲偱丄懌偺晹暘偩偗偼拲暥丅丂寧枛偵撏偔偲偺偙偲偱丄妝偟傒偑傑偨憹偊偨丅
乮俀侽侽俁擭丂侾侽寧丂侾俁擔乯
丂傂偝傃偝偵峏怴偱偡丅
丂崱擔丄俁楢媥偺嵟廔擔乮寧梛擔乯偵丄廐梩尨傊攦偄暔傊弌偐偗傑偟偨丅丂偟丄偟傑偭偨両丂傑偨偟偰傕丄廐寧捠彜偝傫偺掕媥擔偱偟偨丅丅丅
丂壛懍搙僙儞僒乕傪峸擖偟傛偆偲巚偭偰偒偨偺偱偡偑丄偦傟偑攦偊側偄丅丅丅丂偲傝偁偊偢丄愮愇偱儊乕僇乕偑堘偆偗偳丄壛懍搙僙儞僒乕偑攧傜傟偰偄偨偺偱丄偦傟傪峸擖丅
丂傑偨丄師夞偺 RoboOne 偼丄偐側傝儗儀儖偑忋偑傝偦偆側婥偑偡傞偺偱丄僶乕僯儞僌媨揷偝傫偺
Web 偵怗敪偝傟偰丄僒乕儃偺夵憿丄惂屼宯偺愝寁側偳杮奿揑偵傗偭偰傒傛偆偲僷乕僣傪懙偊傞偙偲偵偟傑偟偨丅丂尰帪揰偱偼丄壗偑埆偄偐丄傑偨丄崱傗傞偙偲偑岠壥偑偱傞偺偐丄傑偭偨偔傢偐傜側偄偺偱偡偑丄傗傞偩偗偺偙偲偼傗傜側偄偲婥偑偡傑側偄惈奿側偺偱丄偲偵偐偔丄傗偭偰傒傞偙偲偵偟傑偡両丂偨偩偟丄懯栚偩偲巚偆偲偙傠偼丄婛懚偺僷乕僣傪棳梡偲偄偆偙偲偱丅丅丅
- 愮愇偝傫偱峸擖偟偰傒偨俀幉壛懍搙僙儞僒偲偦偺憹暆夞楬偱偡丅
- OPAMP (JRC 4558DD) 傪俁偮攝抲偟偨婎斅偼丄婡懱偵懳偟偰悅捈偵愝抲偡傞梊掕側偺偱丄係僺儞偺僺儞僿僢僟偲僺儞僼儗乕儉傪巊偭偰壛懍搙僙儞僒偑悈暯偵側傞傛偆偵偟偰傒傑偟偨丅
丒丒丒丂偪傚偭偲峳偭傐偄敿揷晅偗偩偑丄側傫偲偐摦偔偼偢両丠
丒丒丒丂尰帪揰偱偼丄俀屄暘偺 OPAMP 偟偐敿揷晅偗偟偰偄側偄偺偱丄摦嶌妋擣偑偱偒傑偣傫偑丒丒丒
- 夞楬恾揑偵偼丄壛懍搙僙儞僒偵揧晅偝傟偨愢柧彂偺 OPAMP 晹暘傪愭偺 4558DD 偵曄偊偰傒偨偩偗
丒丒丒恾拞偺 OPAMP 傪挷傋偨偺偱偡偑丄尒偮偐傜偢丄摿惈偑晄柧偱偟偨丅丂偦傟偱斈梡昳傪巊偭偨偲偄偆偙偲偱偡丅
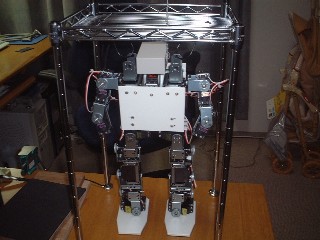
丂傑偩丄偍斺業栚丠偟偰偄側偐偭偨丄R1N5 婡懱偺幨恀傪偲偭偨偺偱丄徯夘偟傑偡丅
- 偐側傝偡偭偒傝偟偨婡懱偱偡 (R1N5)丅
- 儂乕儉僙儞僞乕偱擖庤偟偨僼儗乕儉偵傇傜壓偘傞宍偱揹尮傪擖傟偰偄側偄偲偒偵屌掕偡傞傛偆偵偟偰傒傑偟偨丅
- 儃僨傿晹偺敀偄巐妏偼丄慜夞摨條俁倣倣岤偺僾儔僶儞丅
摢偺晹暘偼丄ABS庽帀偺働乕僗偵擖偭偨 RC 庴怣婡仌3664F 婎斅丅
- 懌娫妘偑寢峔奐偄偰偄傞偑丄摦嶌斖埻傪峀偘偨偐偭偨偺偱丄偙偆側偭偰偟傑偭偨丅丅丅
曕峴僷僞乕儞偑枹偩偵偆傑偔偮偔傟側偄偺偼丄偙偺偣偄偐側丠丠
曕偐偣傞偲丄懌偲懌偑廳側偭偰偟傑偆姶偠偵側偭偰偟傑偆偺偱偡丅丅丅
扨弮偵傾僫儘僌僒乕儃偺僩儖僋偺栤戣偐側丠丠
- 僩儖僋偲偄偊偽丄KO偺僴僀僷儚乕僊傾丅
拲暥傪偟偰偄偨偺偱偡偑丄侾侽寧枛擖庤梊掕偑丄侾侾寧枛偵側偭偰偟傑偭偨丅
- 揮搢偟偰傕儅僓乕儃乕僪偵僇僶乕傪偡傞偙偲偱丄側傫偲偐戝忎晇偵側偭偨丅
慜夞偺婡懱偩偲崢偺晹暘偑庛偦偆丄偲偄偆傾僪僶僀僗傪庴偗偰偄偨偺偱丄偦偙傕嫮壔丠偟偰傒傑偟偨丅
丒丒丒丂懡彮偼嫮偔側偭偨偼偢偱偡乮偙偺妏搙偱偼尒偊側偄偱偡偹乮徫乯乯
- 傗偼傝丄巗斕偺CPU儃乕僪偲惂屼婎斅偼丄戝偒偄偱偡丅
儃僨傿偑僘儞僌儕偟偰偟傑偭偰傞偺傕丄偙偺僒僀僘偵偁傢偣偰嶌傜偞傞傪偊側偐偭偨偐傜偱偡丅
RoboOne 戞俁夞桪彑偺 A-Do 偝傫偺傛偆偵儔儞僪僙儖曽幃偵偡傟偽懡彮偼偡偭偒傝偡傞偺偐傕偟傟側偄丄偲偄傑偝傜側偑傜偵姶偠傑偟偨丅丂偝偡偑愭恖偼峫偊偰傑偡偹丅
丂偲傝偁偊偢丄偙偺傑傑偺忬懺偱偍偄偰偍偄偰丄FPGA, 儌乕僞惂屼FET 偺曌嫮傪奐巒丅
丂偦傠偊偨晹昳側偳丄憤妟傪峫偊傞偲丅丅丅丂傕偆屻偵偼堷偗側偄丅丂戞俆夞偑柍棟偱傕丄戞俇夞乮偁傞偺偐丠乯偵偼弌応偟偰丄CtoC傗丄Staires偵挧愴偟偰丄徿嬥傪僎僢僩偟偰傗傞偧両両丂偲丄摤巙傪擱傗偡偺偱偟偨丅丅丅
乮俀侽侽俁擭侾侾寧俁擔乯